Lunares
Rekonfigurierbare Robotersysteme für lunare Missionen

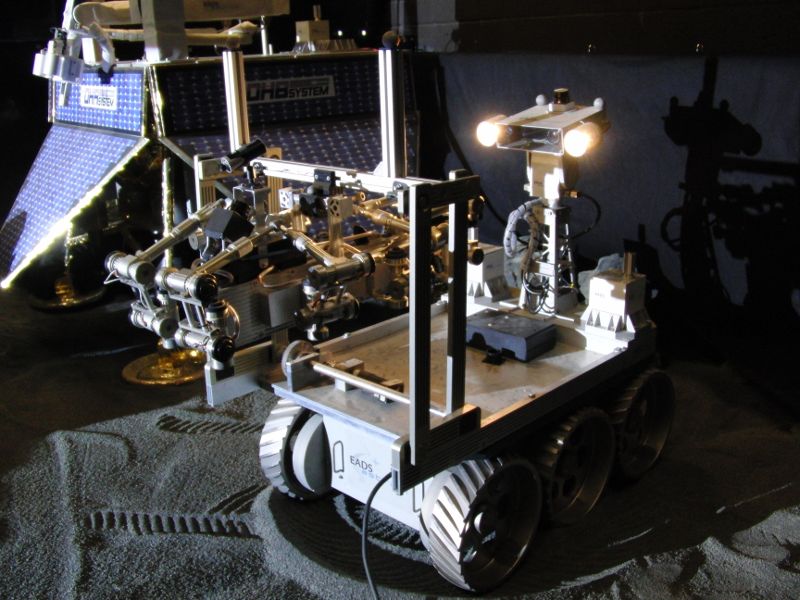
Das Ziel des Vorhabens Lunares (gefördert von der DLR und der BIG Bremen) ist die Evaluierung von State-of-the-Art Robotiktechnologien für zukünftige kooperative, heterogene, extraterrestrische Missionen mit rekonfigurierbaren Robotern. Hierzu wird auf Basis vorhandener Robotersysteme zusammen mit den Partnern ein rekonfigurierbares Robotersystem bestehend aus einem Lander (OHB) mit Manipulator, einem Rover (EADS Astrium) und einem Kletterroboter (DFKI) entwickelt, dessen Vielseitigkeit und Robustheit in einem nachgebildeten lunaren Kraterexplorationsszenario getestet und demonstriert wird.
| Laufzeit: | 01.07.2007 bis 31.12.2009 |
| Zuwendungsempfänger: | Deutsches Forschungszentrum für Künstliche Intelligenz GmbH |
| Fördergeber: |
Deutsches Zentrum für Luft- und Raumfahrt e.V.
Bundesministerium für Wirtschaft und Technologie BIG Bremen |
| Förderkennzeichen: | Gefördert von der Raumfahrt-Agentur des Deutschen Zentrums für Luft- und Raumfahrt e.V. mit Mitteln des Bundesministeriums für Wirtschaft und Technologie aufgrund eines Beschlusses des Deutschen Bundestages, Förderkennzeichen 50RA0706 und der BIG Bremen Förderkennzeichen INNO1036A. |
| Partner: | EADS Astrium GmbH, OHB System AG |
| Anwendungsfelder: | Weltraumrobotik |
| Verwandte Projekte: |
AMOR
Acquisition of Moon Oxygen Resources
(04.2007-
10.2007)
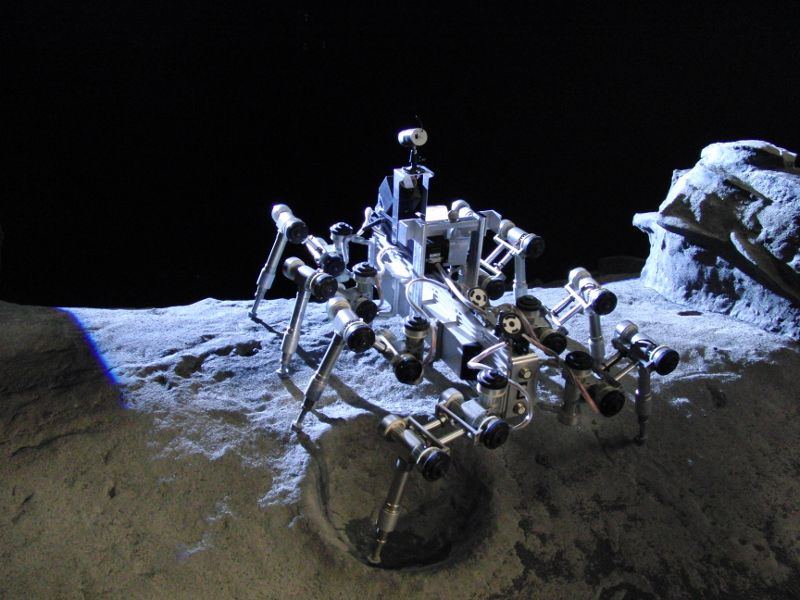
SCORPION
Ein achtbeiniger Roboter für schwieriges Terrain
(01.2001-
12.2005)
SpaceClimber
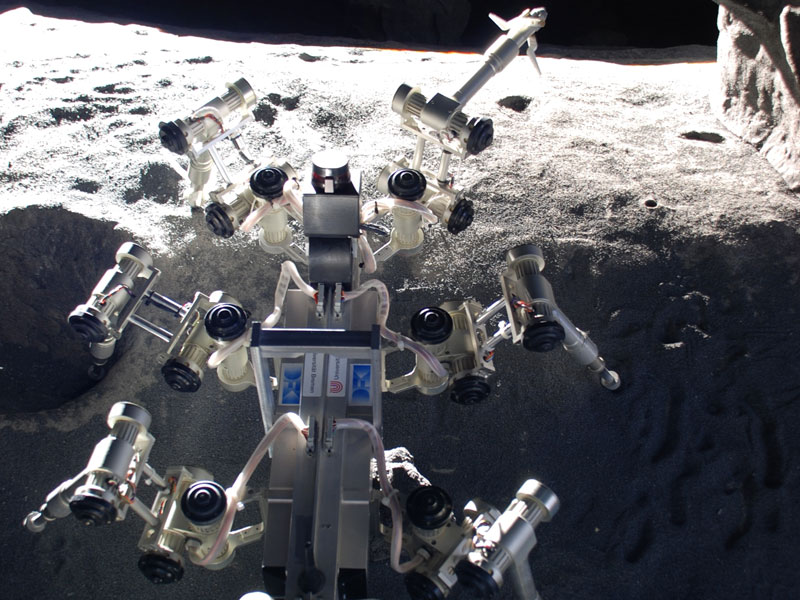
Ein semi-autonomer freikletternder Roboter zur Untersuchung von Kraterwänden und -böden
(09.2006-
09.2009)
|



Projektdetails


Ziel des Projektes Lunares ist die Erprobung von verschiedenen hochmodernen Robotiktechnologien, die gezielt zur Erforschung von Mondkratern eingesetzt werden können. In diesem Rahmen arbeiten das Deutsche Forschungszentrum für Künstliche Intelligenz (DFKI GmbH), EADS Astrium GmbH und OHB-System AG als Partner zusammen.
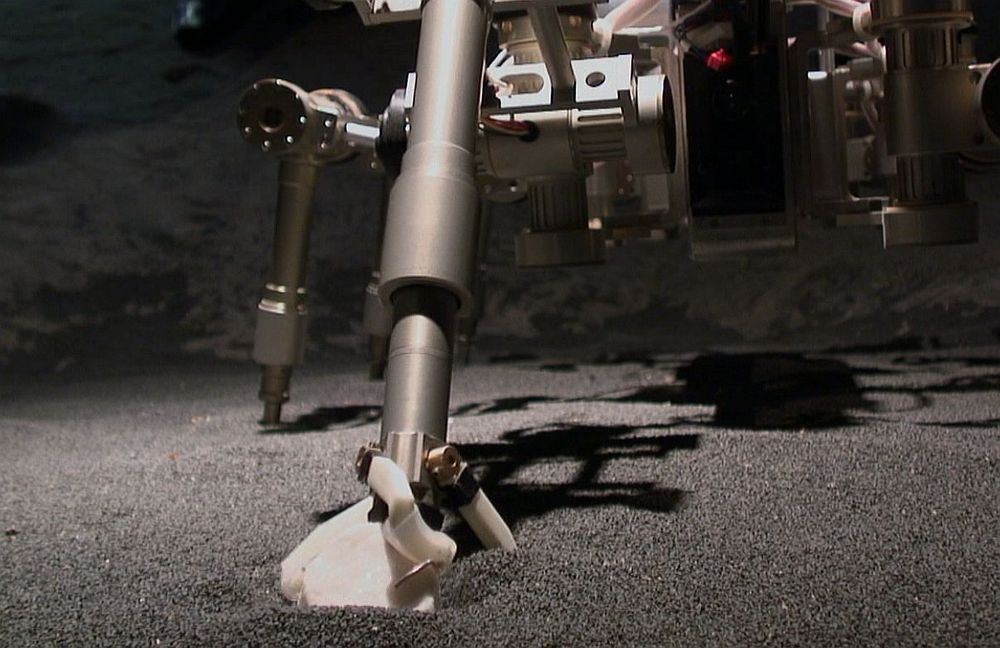
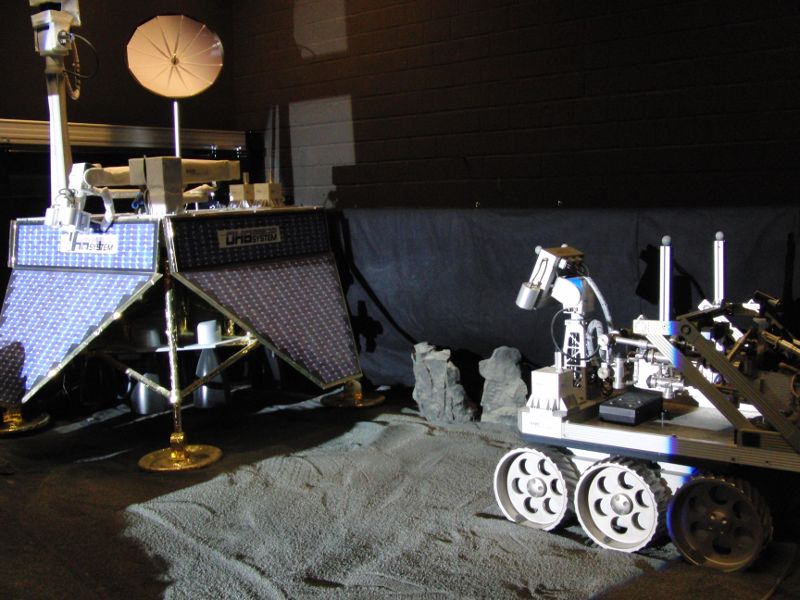
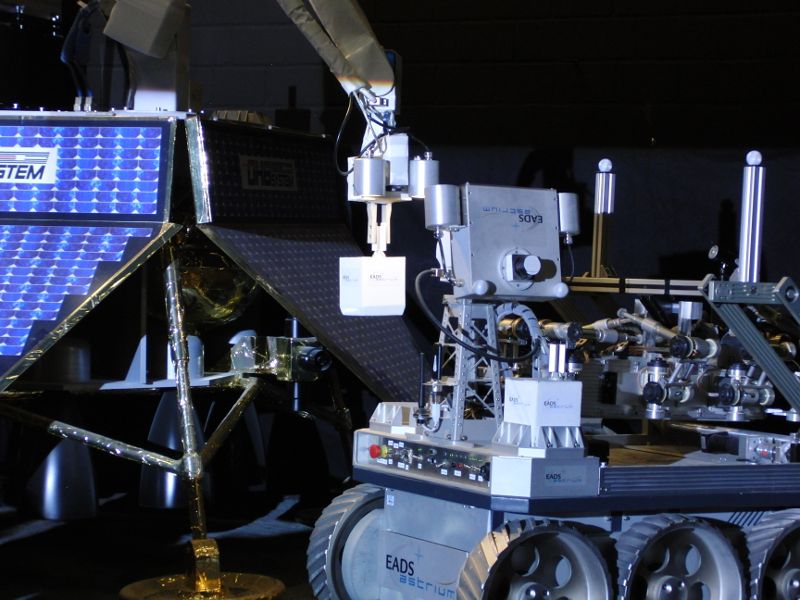
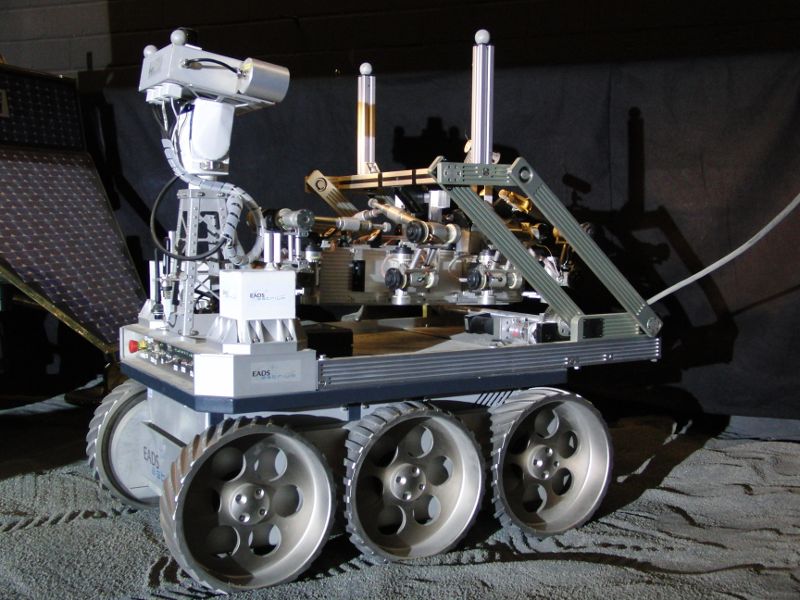
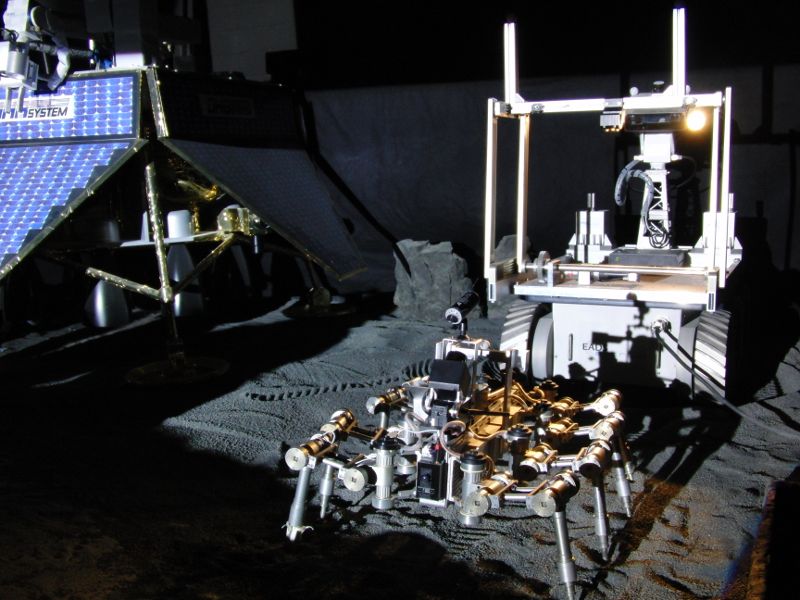
In einer der Mondoberfläche nachempfundenen Landschaft soll ein Roboterteam, bestehend aus einem Manipulatorarm (EADS Astrium), der an einem Landefahrzeug (OHB System) montiert ist, einem Rover (EADS Astrium) und einem Laufroboter (DFKI), getestet werden. Das Explorationsszenario ist dabei als ein Nachweis der Machbarkeit von zukünftigen kooperativen, heterogenen, extraterrestrischen Missionen mit rekonfigurierbaren Robotern zu betrachten, wobei der Mond im Brennpunkt des Interesses steht.
Im Rahmen von Lunares soll aufgezeigt werden, welche robotischen Fähigkeiten zur Unterstützung von Wissenschaft und Exploration auf einer planetarischen Oberfläche bereits heute in dieser Kooperation existieren und wie diese kombiniert werden können, um aus mehreren Einzelkomponenten ein Gesamt-Robotiksystem aufzubauen. Dieses soll sowohl lokal autonom handeln als auch von einem bestehenden Kontrollzentrum aus ferngesteuert werden können.
Zur Erprobung dieses rekonfigurierbaren Roboterteams sowie anderer zukünftiger Robotersysteme soll eine realistische Testumgebung geschaffen werden, die einer Mondkraterlandschaft nachempfunden ist. In dem nachgebildeten Szenario soll die Vielseitigkeit und die gegenüber einzelnen Robotern größere Funktionalität des Teams untersucht und nachgewiesen werden.
Videos
Lunares: Rekonfigurierbare Roboter für extraterrestrische Explorationsvorhaben

Rekonfigurierbare Roboter für extraterrestrische Explorationsvorhaben


Missions-Sequenz
Foto: DFKI GmbH