CIAM
Cooperative Development of a Comprehensive Integrated Autonomous Underwater Monitoring Solution

In the CIAM project, autonomous underwater vehicles (AUVs) are being developed that are capable of autonomous inspection missions with a travel distance of 500km. This eliminates the need for supply vessels and allows a mission to start in one port and end in another remote port. For this purpose, two innovative AUVs are designed, manufactured, integrated and tested: one for a diving depth of 1000m, the other for 5000m. Among other things, the focus is on an efficient propulsion system, a novel energy supply including a fuel cell, innovative sensor technology (compact sub-bottom profiler, measurement of the electric field) as well as a long-term-robust software. Various components of the system can be intelligently switched on or off during certain mission segments to increase the energy efficiency of the overall system without sacrificing good navigation quality. An actuated docking station will be developed for deploying or retrieving AUVs from a ship (if required by the mission). The goal of the project is to enable frequent long-range inspections without having to rely on the availability of ships or good weather conditions at the water surface.
| Duration: | 01.05.2021 till 31.10.2024 |
| Donee: | German Research Center for Artificial Intelligence GmbH |
| Sponsor: | Federal Ministry for Economic Affairs and Climate Action |
| Grant number: | 03SX540D |
| Partner: |
Rosen Gruppe |
| Application Field: | Underwater Robotics |

Videos
CIAM: Exploring the Challenges of Docking Procedures with a Remotely Operated AUV
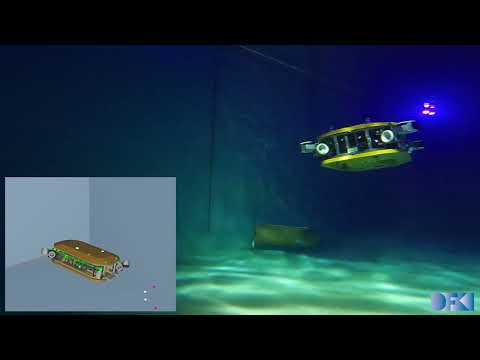
Autonomous underwater vehicles (AUVs) are already being used to inspect structures in deep waters. However, the systems are still accompanied by large supply ships, launched at sea, and retrieved – a risky and, at the same time, costly undertaking. Together with partners from industry and research, DFKI is developing intelligent AUVs in the joint project CIAM (“Cooperative Development of a Comprehensive Integrated Autonomous Underwater Monitoring Solution”). These systems are capable of covering large distances and monitoring deep-sea installations at different locations without the use of additional ships. The energy supply (and prospectively also the capture of broken-down underwater vehicles as well as the exchange of information) is to be ensured by actuated charging stations, which can be sent out as needed and dock autonomously to the systems. The video shows experiments in the large saltwater basin of the DFKI's Maritime Exploration Hall in Bremen. Until the actual hardware is available, the AUV Cuttlefish, which is technically similarly equipped, serves as a placeholder for the charging station and the tube as a placeholder for the target vehicle. The docking procedure, which is still manual here, is a highly complex operation even in calm waters. To check afterwards how exactly this process has worked, the positions of the Cuttlefish and the tube can be tracked live with the aid of a Qualisys motion tracking system. For this purpose, several reflective spheres are attached to the surfaces of the systems, which can be tracked by a total of twelve cameras with UV emitters.