CIAM
Cooperative Development of a Comprehensive Integrated Autonomous Underwater Monitoring Solution

Im Projekt CIAM werden autonome Unterwasserfahrzeuge (AUVs) entwickelt, die in der Lage sind, selbstständig Inspektionsmissionen mit einer Fahrtstrecke von 500km durchzuführen. Dadurch sind keine Versorgungsschiffe mehr erforderlich und eine Mission kann in einem Hafen gestartet werden und in einem weit entfernten anderen Hafen enden. Dazu werden zwei innovative AUVs konzipiert, gefertigt, integriert und getestet: eines für eine Tauchtiefe von 1000m, das andere für 5000m. Der Fokus liegt dabei u.a. auf einem effizienten Antrieb, einer neuartigen Energieversorgung inkl. Brennstoffzelle, innovativer Sensorik (kompakter Sub-Bottom-Profiler, Messung des elektrischen Feldes) sowie einer langzeit-robusten Software. Verschiedene Komponenten des Systems können während bestimmter Missionssegmente intelligent zu- oder abgeschaltet werden, um die Energieeffizienz des Gesamtsystems zu erhöhen, ohne dabei auf eine gute Navigationsqualität zu verzichten. Für die Ausbringung bzw. Einholung der AUVs von einem Schiff (sofern die Mission dies erfordert) wird eine aktuierte Docking-Station entwickelt. Ziel des Projektes ist es, regelmäßige Langstrecken-Inspektionen zu ermöglichen, ohne auf die Verfügbarkeit von Schiffen bzw. gute Wetterbedingungen an der Wasseroberfläche angewiesen zu sein.
| Laufzeit: | 01.05.2021 bis 31.10.2024 |
| Zuwendungsempfänger: | Deutsches Forschungszentrum für Künstliche Intelligenz GmbH |
| Fördergeber: | Bundesministerium für Wirtschaft und Klimaschutz |
| Förderkennzeichen: | 03SX540D |
| Partner: |
Rosen Gruppe |
| Anwendungsfelder: | Unterwasserrobotik |

Videos
CIAM: Erkundung der Herausforderungen von Andockvorgängen mit einem ferngesteuerten AUV
Autonome Unterwasserfahrzeuge (AUVs) werden bereits zur Inspektion von Strukturen in tiefen Gewässern eingesetzt. Noch werden die Systeme jedoch von großen Versorgungsschiffen begleitet, auf See ausgesetzt und wieder eingeholt - ein riskantes und zugleich kostspieliges Unterfangen. Gemeinsam mit Partnern aus Industrie und Forschung entwickelt das DFKI im Verbundprojekt CIAM ("Cooperative Development of a Comprehensive Integrated Autonomous Underwater Monitoring Solution") intelligente AUVs. Diese Systeme sind in der Lage, große Entfernungen zu überwinden und Tiefseeanlagen an verschiedenen Standorten zu überwachen, ohne dass zusätzliche Schiffe eingesetzt werden müssen. Die Energieversorgung (und perspektivisch auch das Auffangen liegengebliebener Unterwasserfahrzeuge sowie der Informationsaustausch) soll durch angetriebene Ladestationen sichergestellt werden, die je nach Bedarf ausgesandt werden und autonom an die Systeme andocken können.
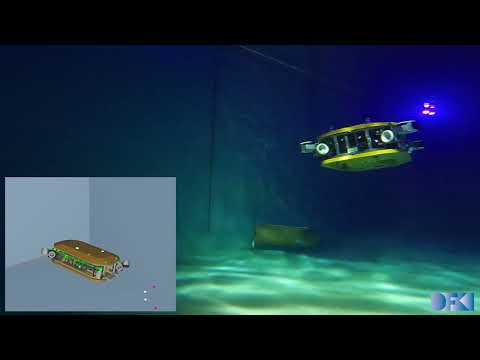
Das Video zeigt Versuche im großen Salzwasserbecken der Maritimen Forschungshalle des DFKI in Bremen. Bis die eigentliche Hardware zur Verfügung steht, dient das technisch ähnlich ausgestattete AUV Cuttlefish als Platzhalter für die Ladestation und das Rohr als Platzhalter für das Zielfahrzeug. Der Andockvorgang, der hier noch manuell erfolgt, ist selbst in ruhigen Gewässern ein hochkomplexer Vorgang. Um im Nachhinein zu überprüfen, wie genau dieser Vorgang funktioniert hat, können die Positionen des Tintenfisches und der Röhre mit Hilfe eines Qualisys Motion-Tracking-Systems live verfolgt werden. Dazu werden mehrere reflektierende Kugeln an den Oberflächen der Systeme angebracht, die von insgesamt zwölf Kameras mit UV-Strahlern verfolgt werden können.