
Exoskeleton and Tele-operation Control
A primary goal of VI-Bot project is the development of an intrinsically safe, wearable exoskeleton that increases the operability of a robotic target system, and at the same time, enables an intuitive tele-operation session. The technical innovation developed within the project is the unique combination of a kinematic structure adapted to the human anatomy, which is driven by an active-compliant actuation system and controlled via bio-inspired paradigms.Due to its high dynamics, the haptic interface is able to deliver a fine-tuned multi-points haptic feedback. This improves the immersion of the operator into the work scenario and at the same time helps to compensate the mass and the inertia of the device.
A second goal of the VI-Bot project is the flexible mapping between the exoskeleton and distinct target robotic systems.
Design Process
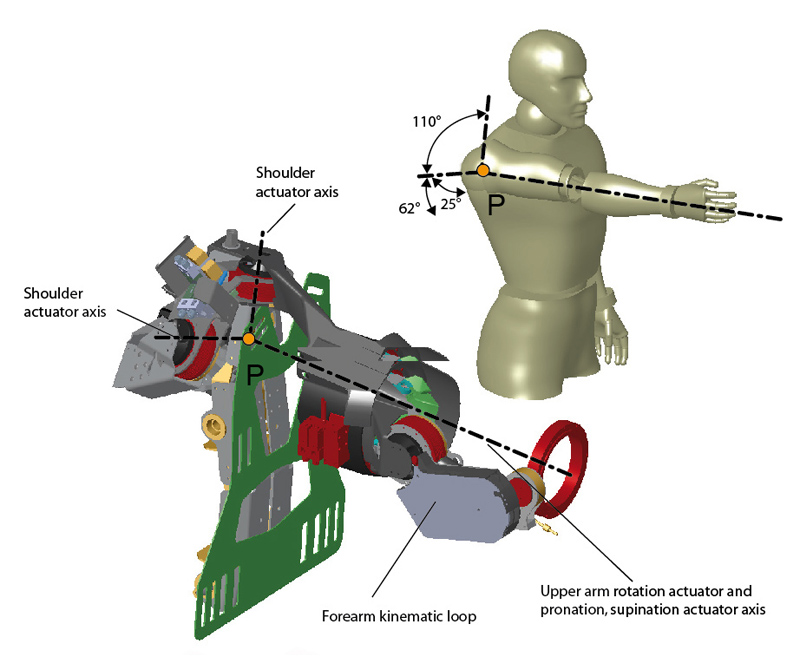
The design and the evaluation of the exoskeleton kinematics is accomplished via a combination of model-based and motion-analysis-based techniques (Fig. 1). Therefore in a first step, movements of the operator are acquired both via the exoskeleton’s sensors and the motion tracking system. Afterwards the kinematic model is adjusted according to the experimental results, which improves the workspace of the arm-exoskeleton structure. (Fig. 2).

Actuation Concept
Due to the fact that the user has direct contact with an active robotic system (Exoskeleton), inherent safety is a must. A mechanism that controls the maximum force applied to the user’s limb is therefore needed . This is possible if each joint is equipped with a proper actuation system (actuator+controller) that allows to set a specific impedance.Current state-of-the-art actuators fail to provide at the same time high power, compactness, and impedance regulation.Hydraulic actuators, on the contrary, exhibit a number of advantages over electrical motors; namely higher force-to-weight ratio (without the need for gearboxes), faster response time, accurate position control, compact size, and backdrivability.
The innovative VI-Bot actuation concept unites a high power hydraulic actuator and a pneumatic spring connected in series. This approach allows at the same time the stiffness regulation and a high power-to-weight ratio (Fig. 3).

Control System
Because of the exoskeleton being permanently in physical contact with the operator, and in addition to that in „virtual“ contact with the tele-operated robot, a proper control system is needed. It must be capable of regulating the posture and the stiffness of the exoskeleton simultaneously. In any situation, a safety mechanism is required that avoids dangerous feedback forces to the user’s arm (caused for example by unexpected movements of the teleoperated robot). This mechanism should work anytime, despite of any power-supply or software failure.
The system to be controlled has an inherent nonlinear characteristic caused by different factors: the nonlinearity of the pneumatic spring, the nonlinearity of the hydraulic system, and the interaction with the human body. Due to this, pure classical control theory does not satisfy the need for a high performance controller. Therefore alternative control paradigms should be explored.
The developed approach is based on the foundation and current knowledge of the field of neurophysiology. We mimicked and adapted the architecture of specific neural circuits located in the human spinal cords, which are dedicated to control position, and force of the human muscles.
The schema in Figure 4 represents a first trial to mimic this control architecture, combining different kind of strategies: position control, force control, stiffness control, safety mechanisms. These different loops, due to the intrinsic parallel nature of the artificial neural network, can superpose and coordinate in order to perform the best control action.
Kinematics, Dynamics & Mapping
For the usage of the exoskeleton as a control device in a teleoperation scenario, it is coupled with a second robotic system that performs the real manipulation tasks at the remote working site. This coupling can be described as a bidirectional, continuous, nonlinear mapping between motion- and force-spaces of the two systems.
A systematic modeling of Forward - and Inverse Kinematics and Forward- and Inverse Dynamics for both, the compound human-arm-exoskeleton system and the target robotic system, are central requirements for establishing a powerful, real-world coupling between the operator’s and the manipulation system.In this process, all computations resulting from the models need to be solvable under real-time requirements. The development of the suitable models and their computation algorithms are central challenges that will be solved in VI-Bot project.
Finally, an adaptable teleoperation mapping will be developed on top of these computations. A key point of this mapping will be its generality, meaning that the VI-Bot exoskeleton will be adaptable to different teleoperation settings.