SVEnnI
Service Vehicle Engineered for non-contact Inspection

Technical Details
| Size: | 85x55x70 cm |
| Weight: | 18kg |
| Power supply: |
24V 8Ah powerpack with Hawker-Cyclon 2V 8Ah lead-acid batteries
|
| Actuation/ Engine: |
2x Faulhaber 24V
|
| Sensors: |
Pressure sensor, temperature sensor, digital video camera, laserscanner
|
Organisational Details |
|
| Application Field: | Underwater Robotics |
| This system is not actively used anymore. | |
System description

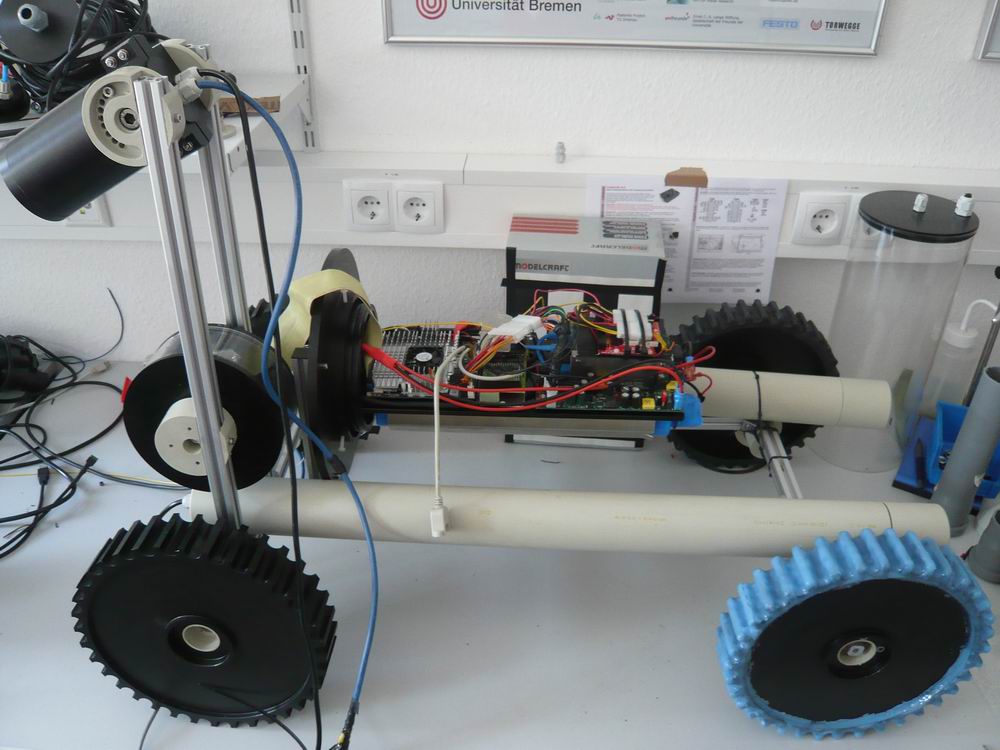

SVEnnI is an inspection vehicle for confined spaces like pipeline and tunnel systems or flooded buildings. Main aim was the development of a technology testing platform which allows on-site evaluation of new sensor and communication systems. The vehicle carries its own power supply (lead-acid batteries), making it a hybrid (autarkic) ROV (remotely operated vehicle) system. Communication is established utilizing an extremely thin and resilient fiber-optic cable. This allows the long travel distances necessary fort he application scenario. The communication cable is carried on the vehicle, and passively un-wound during the mission. This is done to reduce the strain on the cable, which in worst case could result in cable breaking. This increases maneuverability in confined spaces since the cable has not to be dragged around corners.
In case the cable cannot be retrieved after a mission, it can be cut and easily replaced while the vehicle returns safely without any problems. Technically the cable can be re-used if no such problems occur.
SVEnnI is remote-controlled by an operator. He has access to the vehicle’s digital video camera in order to conduct visual inspection of the underwater structures. For sake of documentation they are simultaneously recorded. Additional sensors are classical pressure and temperature sensors as well as a line-laser scanner. In environments with limited water turbidity this laser scanner system allows 3d-measurements of the vehicle’s surroundings.