RH5
Humanoid robot as an assistance system in a human-optimized environment

Technical Details
| Size: | 360 x 750 x 2000 mm |
| Weight: | 62 kg |
| Power supply: |
48 V (Power Adapter)
|
| Speed: | 0.5 m/s |
| Actuation/ Engine: |
17x BLDC RoboDrive + HarmonicDrive
10x RoboDrive + Ballscrew
4x Maxon
3x Dynamixel
|
| Sensors: |
2x ZED mini for near field object detection,
Xsens MTi-300 AHRS IMU,
Velodyne LiDAR VLP-16 Puck for mapping and self-localization,
ATI 6-DOF force torque sensors (4 pc.) at wrist and ankle joint, absolute angle measurement in each joint, force sensors in linear drives of legs
|
| Communication: |
LVDS
|
| Motor electronics: |
DFKI electronic stack for all drives:
- Input voltage: 12V-54V
- FPGA- Spartan 6:XC6SLX45
- Serial communication for Spartan-6 (320MSym/s)
- Sinusoidal commutation
- 2 x LVDS for local sensors
- 2 x Ports for IC Haus MU sensors
|
Organisational Details |
|
| Application Field: |
Assistance- and Rehabilitation Systems
Logistics, Production and Consumer Space Robotics |
| Related Projects: |
TransFIT
Flexible Interaction for infrastructures establishment by means of teleoperation and direct collaboration; transfer into industry 4.0
(07.2017- 12.2021)
|
| Related Robots: |
RH5 Manus
Humanoid robot as an assistance system in a human-optimized environment
Dual Arm Exoskeleton
Exoskeleton for upper body robotic assistance (Recupera REHA)
|
| Related Software: |
Phobos
An add-on for Blender allowing editing and exporting of robots for the MARS simulation
Rock
Robot Construction Kit
NDLCom
Node Level Data Link Communication
MARS
Machina Arte Robotum Simulans
|
System description
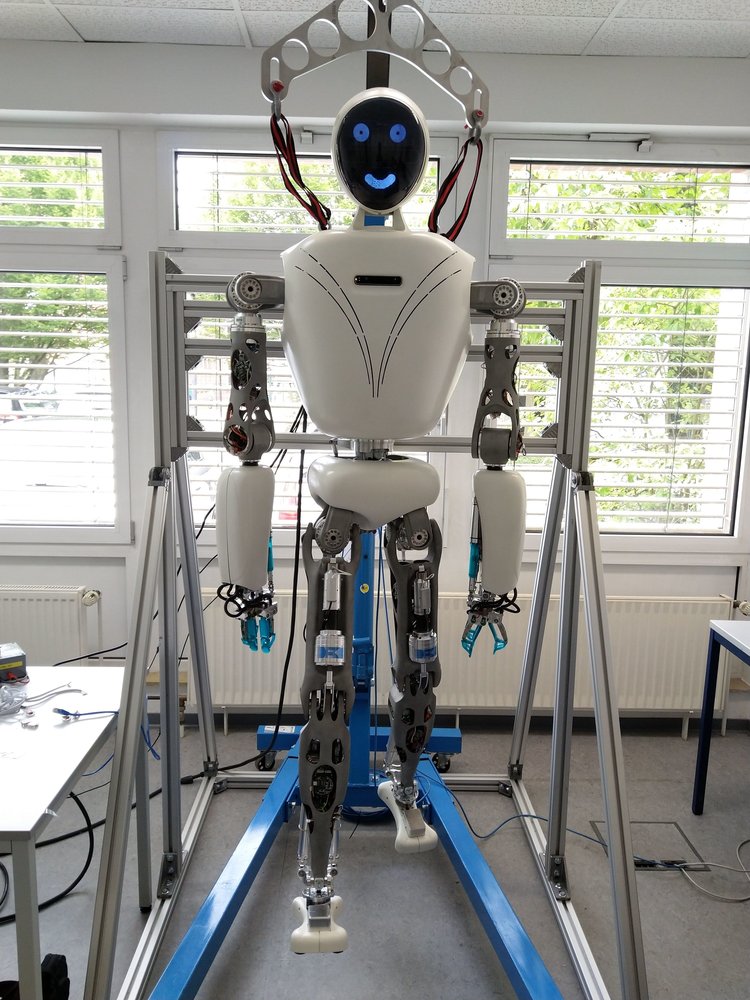
In the mechanical development, a hybrid serial parallel design architecture was employed to achieve a lightweight design with high stiffness and good dynamic properties. In addition to rotatory drive units, linear drive units are also used to exploit non-linear transmission properties.
Videos
RH5: Motion Capture State Feedback for Real-Time Control of a Humanoid Robot
The Video illustrates the results of the paper Mihaela Popescu, Dennis Mronga, Ivan Bergonzani, Shivesh Kumar, Frank Kirchner: "Experimental Investigations into Using Motion Capture State Feedback for Real-Time Control of a Humanoid Robot", Accepted for Publication: MDPI Sensors Journal, Special Issue "Advanced Sensors Technologies Applied in Mobile Robot", 2022.
RH5: Design, Analysis and Control of the Series-Parallel Hybrid RH5 Humanoid Robot
This paper presents a novel series-parallel hybrid humanoid called RH5 which is 2 m tall and weighs only 62.5 kg capable of performing heavy-duty dynamic tasks with 5 kg payloads in each hand. The analysis and control of this humanoid is performed with whole-body trajectory optimization technique based on differential dynamic programming (DDP). Additionally, we present an improved contact stability soft-constrained DDP algorithm which is able to generate physically consistent walking trajectories for the humanoid that can be tracked via a simple PD position control in a physics simulator. Finally, we showcase preliminary experimental results on the RH5 humanoid robot.