Pithekos II

Contact person:
Technical Details
| Size: | 49,0 x 24,5 x 20,7 (LxBxH in cm) |
| Weight: | 2,0kg |
| Power supply: |
2 x 6,0V 2,7Ah NiMH batteries
|
| Speed: | ~1½ body length/sec = 70cm/sec |
| Actuation/ Engine: |
4 (legs) x 2 (joints) = 8 servomotors
|
Organisational Details |
|
| Application Field: | Assistance- and Rehabilitation Systems |
| This system is not actively used anymore. | |
System description
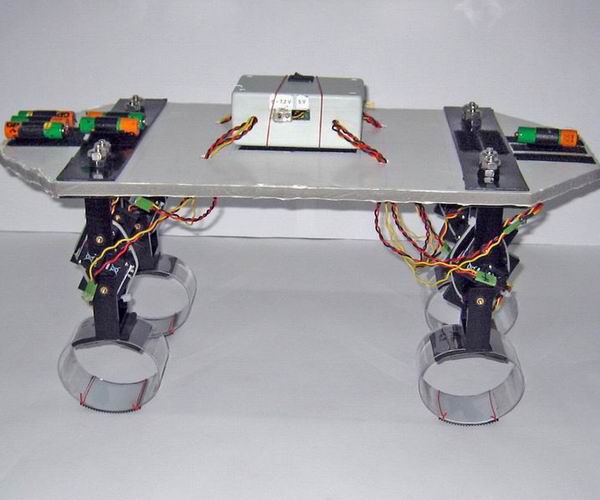
The four-legged robot Pithekos II was developed at the DFKI as part of a master thesis and serves as an experimental platform for dynamic gaits. The dynamic walking is accomplished by a lightweight design, high joint speeds and an elastic foot structure. The robot is remote-controlled and capable of performing tight turns on various surfaces.
Videos
Pithekos: 4 legged galloping robot
The 4-legged robot Pithekos II was developed at the DFKI as part of a diploma thesis and serves as an experimental platform for dynamic gaits.