Pithekos II

Ansprechpartner/in:
Technische Details
| Größe: | 49,0 x 24,5 x 20,7 (LxBxH in cm) |
| Gewicht: | 2,0kg |
| Stromversorgung: |
2 x 6,0V 2,7Ah NiMH Batterien
|
| Geschwindigkeit: | ~1½ Körperlänge/sek = 70cm/sek |
| Antrieb/ Motoren: |
4 (Beine) x 2 (Gelenke) = 8 Servomotoren
|
Organisatorische Details |
|
| Anwendungsfelder: | Assistenz- und Rehabilitationssysteme |
| Dieses System ist nicht mehr aktiv im Einsatz. | |
Systembeschreibung
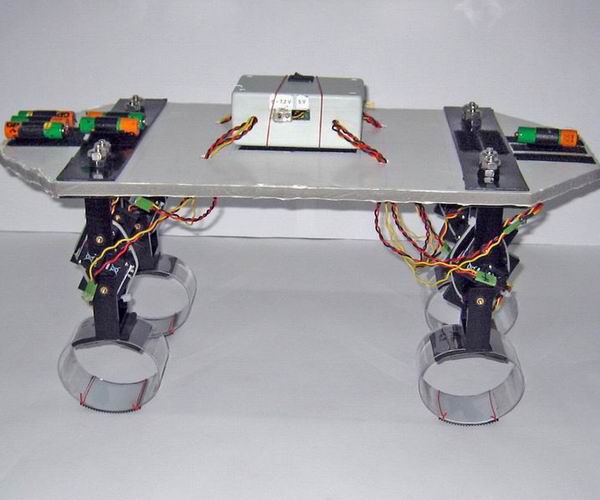
Der vierbeinige Roboter Pithekos II wurde im Rahmen einer Diplomarbeit am DFKI entwickelt und dient als Plattform zur Erforschung dynamischer Gangarten. Jedes Bein besitzt zwei Gelenke, die mit Hilfe von Servomotoren bewegt werden. Das dynamische Laufen wird durch das geringe Gewicht des Systems, hohe Gelenkgeschwindigkeiten und eine elastische Fußstruktur ermöglicht. Durch die Umsetzung biologisch inspirierter Laufmuster ist der Roboter in der Lage, selbst enge Kurven auf unterschiedlichen Untergründen zu laufen. Der Roboter wird ferngesteuert, wodurch der Operator den Radius einer Kurve bestimmen kann.
Videos
Pithekos: 4-beiniger galoppierender Roboter

Durch das Abspielen des Videos akzeptieren Sie die Datenschutzerklärung von YouTube.
Der 4-beinige Pithekos entstand im Rahmen einer Diplomarbeit und dient als Experimentierplattform für dynamische Grundgangarten.