CESAR
Crater Exploration and SAmple Return

Technical Details
| Weight: | 8 kg |
| Power supply: |
LiPo
|
| Actuation/ Engine: |
3x 80W Faulhaber DC
|
| Sensors: |
Colorcamera
|
Organisational Details |
|
| Application Field: | Space Robotics |
| This system is not actively used anymore. | |
System description



The CESAR robot was designed and built at the University of Bremen in order to participate in the ESA Lunar Robotics Challenge. The CESAR team is headed by Prof. Dr. Frank Kirchner. The goal of the challenge is to drive a remote controlled robot into a dark lunar-like crater, find and collect a 100g sample, climb out of the crater and deliver the sample. Eight teams from different universities in Europe were selected by the European Space Agency and participated in the event. The ESA Lunar Robotics Challenge took place in a crater of the Teide National Park on the Tenerife island in the last week of October 2008.
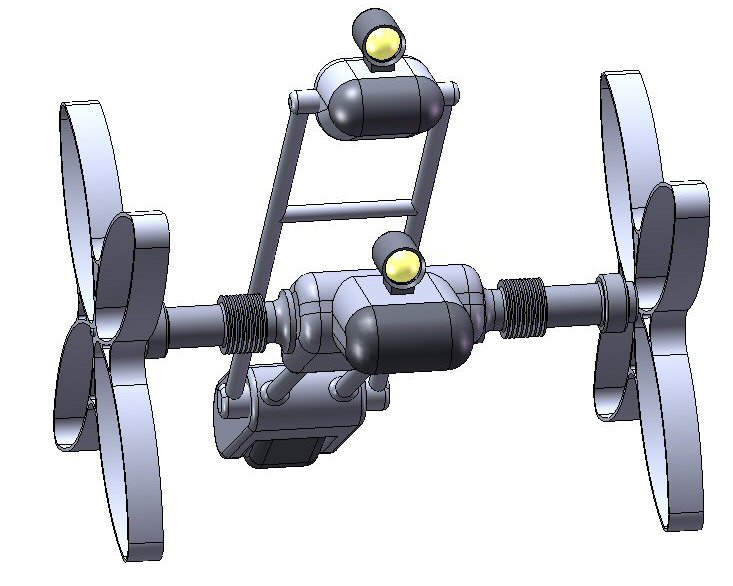
The CESAR Robot uses a hybrid legged wheel design with 5 feet per wheel to negotiate difficult terrain and climb over obstacles. The wheel shape enhances off-road mobility and helps to keep the center of mass low on obstacles. An articulated camera head and head lights enable the operator to control the robot inside the crater and to monitor the sample collection. The shovel that is used to collect and store the soil sample is located in the in the rear section of the robot.
The CESAR platform weights 8kg and is powered by lightweight lithium-ion batteries. The robot weight was minimized using lightweight plastics and carbon fiber material as structural parts.A video and control signal repeater unit that was deployed at the cater rim helped to increase the range of communications and served as a reference point for navigation. One of the difficult tasks was to built a robot that could climb a 40 degree steep crater incline covered with loose gravel. Adding an active paddle in the back helped to improve the climbing performance.
Different foot designs were developed and tested on the CESAR platform. The feet have to be rugged, provide enough traction on steep inclines and prevent the robot from digging into the loose ground. After several iterations with structured rubber feet a biologically inspired fiberglass foot was evaluated and used for the competition. The fiberglass foot provides enough surface area to support the robot and uses two claw-like toes to create a foothold on the loose substrate.
In the night of the competition the CESAR team was able to maneuver the robot into the completely dark crater and find the visually marked soil sample. 100 grams of soil were collected and stored in the sample collection unit. The robot also managed to climb out of the up to 40 degree steep crater and deposit the soil sample in the desired location. With this performance the CESAR team won the first place in the ESA Lunar Robotics Challenge.
For more information please visit:
http://www.esa.int/esaCP/SEMBXQ4KXMF_index_0.html
http://cesar.dfki-bremen.de/
Videos
CESAR: Robot for "ESA Lunar Robotics"
Participation in the ESA Lunar Robotics.




