CESAR
Crater Exploration and SAmple Return

Technische Details
| Gewicht: | 8 kg |
| Stromversorgung: |
LiPo
|
| Antrieb/ Motoren: |
3x 80W Faulhaber DC
|
| Sensoren: |
Farbkamera
|
Organisatorische Details |
|
| Anwendungsfelder: | Weltraumrobotik |
| Dieses System ist nicht mehr aktiv im Einsatz. | |
Systembeschreibung



Der CESAR Roboter wurde an der Universität Bremen entwickelt und gebaut, um an der ESA Lunar Robotics Challenge teilzunehmen. Das CESAR Team wird von Prof. Dr. Frank Kirchner geleitet und von Wissenschaftlern der DFKI unterstützt. Das Ziel des Wettbewerbs war es, einen ferngesteuerten Roboter zu bauen, der aus einem dunklen, mondähnlichen Krater eine Bodenprobe aufnimmt, wieder aus dem Krater klettert und die Bodenprobe an einem dafür vorgesehenen Ort abliefert. Acht Teams verschiedener europäischer Universitäten wurden von der European Space Agency für die Teilnahme ausgewählt. Die ESA Lunar Robotics Challenge fand in der letzten Oktoberwoche 2008 in einem Krater auf Teneriffa im Teide Nationalpark statt.
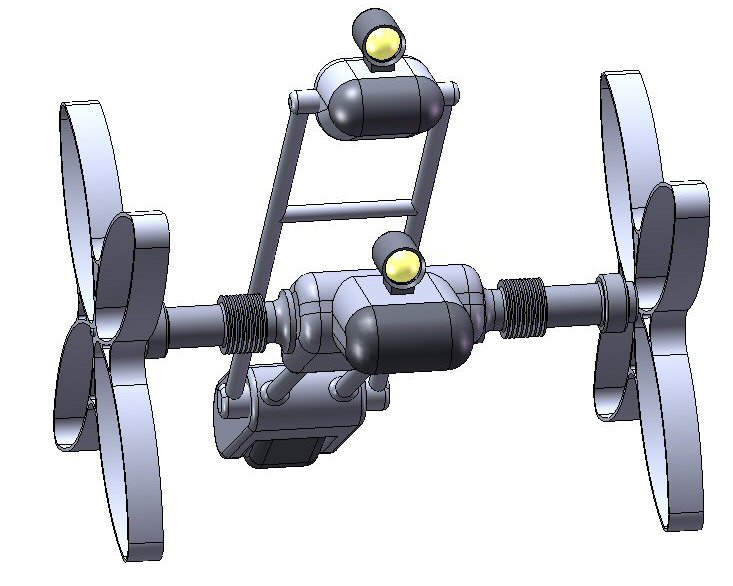
Mit Hilfe eines hybriden Räderdesigns, mit fünf Füßen pro Rad, kann sich der CESAR Roboter durch unwegsames Gelände bewegen und über Hindernisse klettern. Durch einen gelenkigen Kamerakopf und Scheinwerfer ist der Bediener in der Lage, den Roboter innerhalb des Kraters zu steuern und die Probeaufnahme zu überwachen. Die Schaufel, die zur Aufnahme und zum Lagern der Bodenprobe benutzt wird, befindet sich in dem hinteren Teil des Roboters.
Die CESAR-Plattform wiegt 8 kg und wird durch leichte Lithium-Ion-Batterien angetrieben. Das Gewicht des Roboters wurde dadurch minimiert, dass als Strukturelemente leichter Kunststoff und Kohlenfasermaterial benutzt wurde. Durch einen Video- und Steuerungssignal-Repeater, der am Kraterrand aufgestellt wurde und als Bezugspunkt für die Navigation diente, konnte die Kommunikationsreichweite erhöht werden.
Eine schwierige Aufgabe bei diesem Wettbewerb war es, den Roboter so zu bauen, das er in der Lage ist, einen Kraterhang mit losem Schotteruntergrund mit 40 Grad Gefälle hinaufzusteigen. Durch eine angetriebene Walze am hinteren Teil des Roboters wurde das Kletterverhalten verbessert und diese Aufgabe gelöst.Es wurden verschiedene Fußformen entwickelt und auf der CESAR-Plattform getestet. Die Füße müssen robust sein, ausreichend Haftung auf steilen Steigungen besitzen und den Roboter daran hindern, sich in der lockeren Oberfläche einzugraben. Nach mehreren Experimenten mit strukturierten Gummifüßen wurde ein biologisch inspirierter Fiberglasfuß getestet und für den Wettbewerb ausgewählt. Durch diesen Fiberglasfuß erhält der Roboter genügend Bodenhaftung und findet durch zwei klauenähnliche Zehen auf dem losen Untergrund Halt.
In der Wettbewerbsnacht gelang es dem CESAR-Team den Roboter in den völlig dunklen Krater hineinzumanövrieren und die markierte Bodenprobe zu finden. Es wurden 100g der Probe aufgenommen und in dem Transportbehälter untergebracht. Der Roboter war in der Lage, aus dem bis 40 Grad steilen Krater zu klettern und die Bodenprobe an dem gewünschten Ort abzulegen. Mit dieser Leistung belegte das CESAR-Team den ersten Platz in der ESA Lunar Robotics Challenge.
Hier finden Sie weitere Informationen zu dem Wettkampf und dem System:
http://www.esa.int/esaCP/SEMBXQ4KXMF_index_0.html
http://cesar.dfki-bremen.de/
Videos
CESAR: Roboter für die "ESA Lunar Robotics"

Teilnahme bei den ESA Lunar Robotics.





Foto: Felix Grimminger, DFKI GmbH