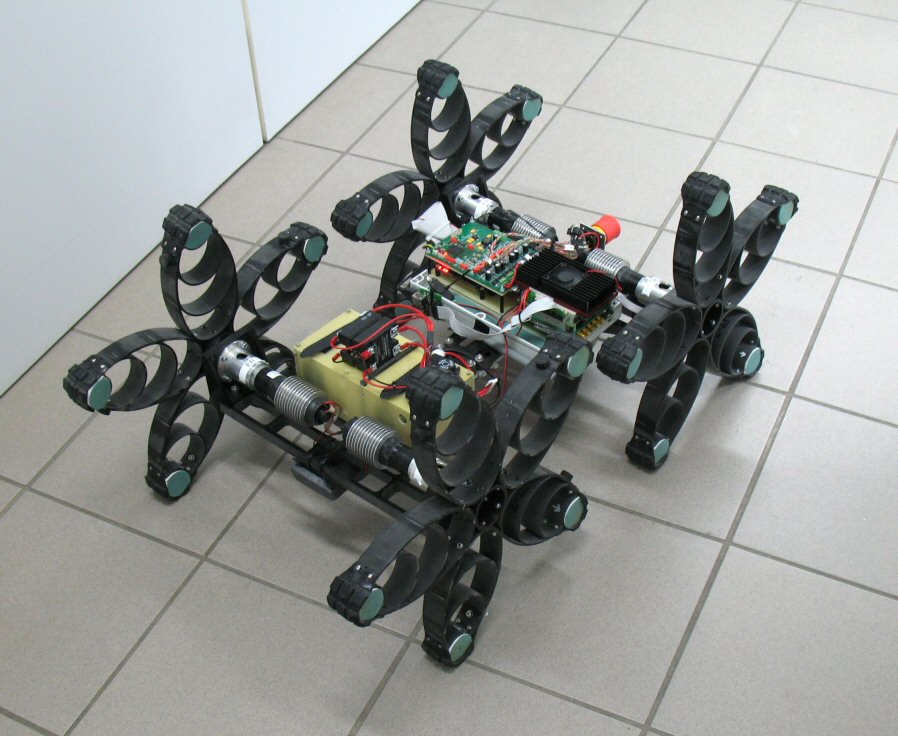
ASGUARD I
Advanced Security Guard V1

Technical Details
| Size: | 95cm x 54cm x 42cm |
| Weight: | 9,5 kg |
| Power supply: |
Rechargeable lithium polymer battery – 32V 10Ah
|
| Actuation/ Engine: |
4 x 80 watts Faulhaber dc motors – planetary gear 46:1
|
| Sensors: |
Motor encoders, Current sensors
|
Organisational Details |
|
| Application Field: | SAR- & Security Robotics |
| Related Projects: |
SentryBot II
An Autonomous, Co-Operative Multi-Robot System for Security and Surveillance
(06.2007- 12.2007)
|
| This system is not actively used anymore. | |
System description


For outdoor locomotion of mobile robots, one has to cope with different requirements for such systems. These robots have to be highly agile and fast on flat ground and, at the same time, should be able to deal with very rough terrain, e.g. rubble, gravel, and even stairs.
This is particularly true for robots which are used for surveillance and search and rescue missions (SAR) in outdoor environment as well as for robots for remote inspection, such as CBRNE detection in crises situations.
Tracked robots are currently regarded as the best trade-off between high velocity and mobility in rough terrain. Those systems have the drawback of high energy consumption due to friction and are generally not able to climb stairs or very steep slopes.
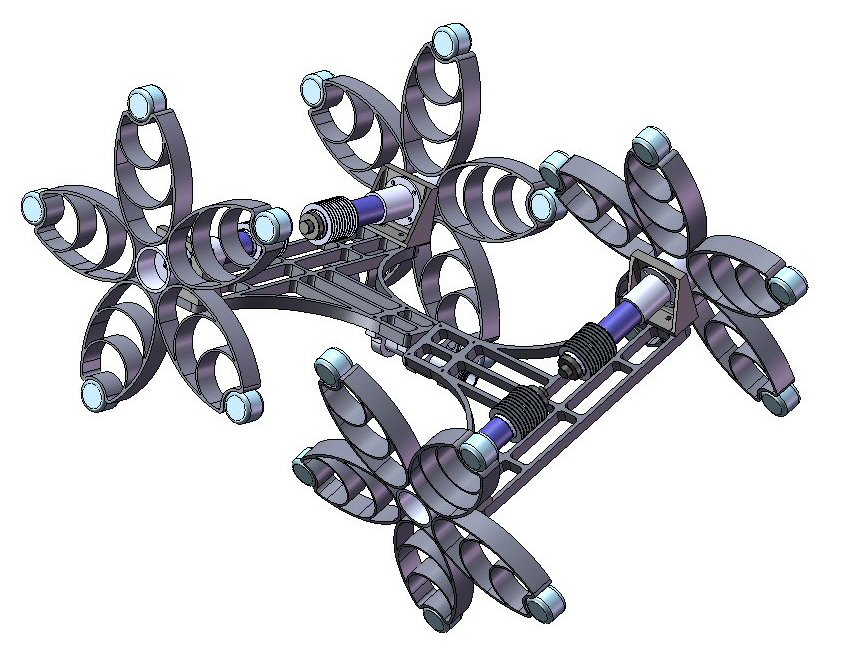
Inspired by quadruped animals we developed the hybrid legged-wheeled robot ASGUARD (cf. Figure 1). The robot was designed to be used in harsh outdoor environment with a focus on security and outdoor surveillance as well as on disaster mitigation missions. For those applications, a robot has to transport a variety of mission-depending application sensors inside a difficult terrain. ASGUARD can climb stairs by using an adaptive, bio-inspired control approach. With the same controller configuration, the robot can traverse flat and even ground with high speed.