go!Cart
Initial project for competitive aerial robot technologies

The project go!Cart aims to establish an network of competence in the area of civil aerial robotics. Applications are manifold and can be found in traffic supervision, inspection of offshore facilities or support for civil protection and disaster management. In latter case flying robots could support the staff on-site by improving their situation awareness with real time informations from video cameras and other sensors.
| Duration: | 01.05.2008 till 31.12.2010 |
| Donee: | German Research Center for Artificial Intelligence GmbH |
| Sponsor: |
WFB Bremen Economic Development GmbH
European Union |
| Partner: | Rheinmetall Defence Electronics GmbH, Hochschule Bremen Oldenburger Forschungs- und Entwicklungsinstitut für Informatik-Werkzeuge und -Systeme (OFFIS), Deutsches Zentrum für Luft- und Raumfahrt e.V., Deutsche Flugsicherung GmbH, CebeNetwork GmbH, Haindl Ku |
| Application Field: | SAR- & Security Robotics |


Project details
The aim of go!Cart can be subdivided into:
- Establishing a network of competency in flight robotics
- Having a pool of knowledge and technology in this area
- Realising flight robot prototypes
- Demonstrate the prototypes within some pilot applications
- Derive regulations for operating flight robots in the civil airspace
The project will result in flying systems and components for operating the robots. The DFKI RIC Bremen contributes to the project with components which are of significant importance for using flight robots:
- Inertia measurement platform for state estimation
- Network for efficiently connecting sensors and actuators of a flight robot Mission planer
- Communication link between airborne and stationary part of the system
State estimation:
Modern microelectronics is a cost efficient alternative for the avionics of flight robots. Especially as a flight robot is subject to strong weight limitations. The DFKI RIC Bremen develops an inertial measurement platform for estimating the state of the flight robot. The required accuracy should be obtained with standard components and adequate use of filters and computational methods. Additional sensors like camera and GPS are considered.
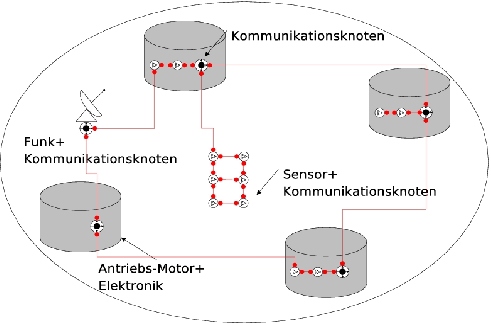
Sensor/actuator network:
A network technology is under development which is capable of connecting sensors and actuators on a flight robot in an efficient manner. The effort of routing is reduced by the design of the protocol and considering the topology of the network.
Mission planer:
Amission planer software module is supposed to find a optimal flight path for a given task with as few inputs as possible. The flight must take place with in given boundaries and regulations.
Data link:
As a flight robot is a unique platform for carrying sensors of all kind it is necessary to bring the produced data to the ground. This transfer uses a communication link of variable quality. Therefore the DFKI RIC Bremen develops a software module that allows to transmit some big amount of data from different source of this link.