ARAMIES

Technische Details
| Größe: | 80 x 44 x 70 (LxBxH in cm) |
| Gewicht: | ~35 kg |
| Stromversorgung: |
28,8V, 9Ah NiMh Batterien
|
| Geschwindigkeit: | ~0,1 Körperlänge/sek = 8 cm/sek |
| Antrieb/ Motoren: |
4 (Beine) x 6 (Gelenke)+ 1 (Kopf) x 2 (Gelenke) = 26 Motoren
|
Organisatorische Details |
|
| Anwendungsfelder: | Weltraumrobotik |
| Verwandte Projekte: |
ARAMIES
Ambulating Robot for Autonomous Martian Investigation, Exploration and Science
(04.2004- 04.2007)
ARAMIES
Ein Laufroboter für autonome planetarische Erkundung
(04.2004- 04.2007)
|
| Dieses System ist nicht mehr aktiv im Einsatz. | |
Systembeschreibung


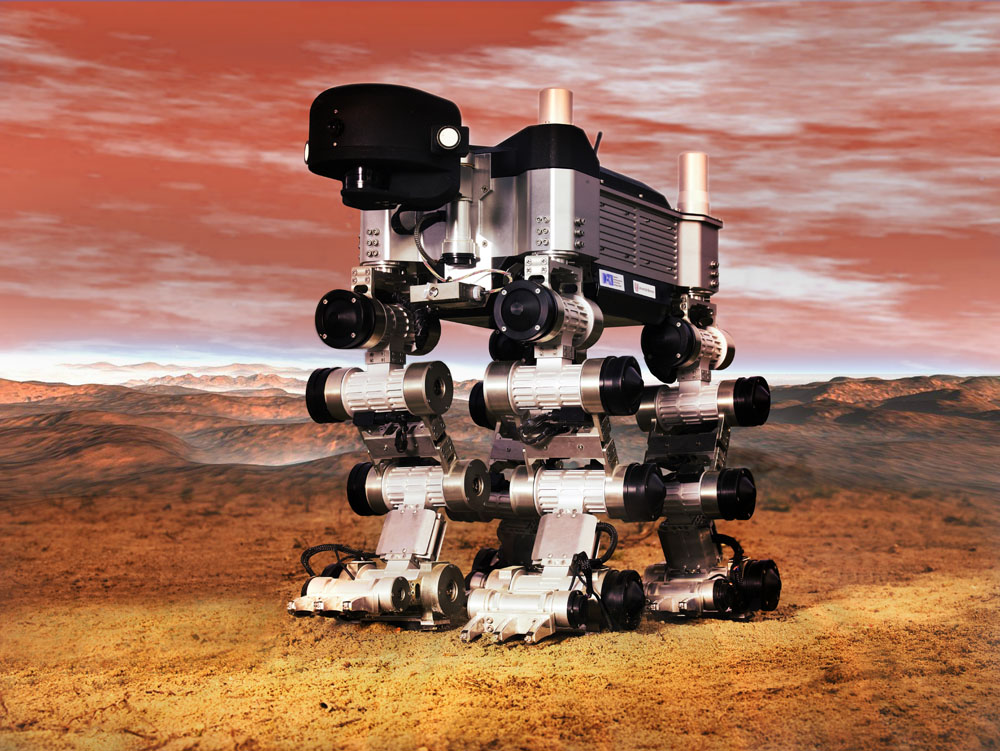
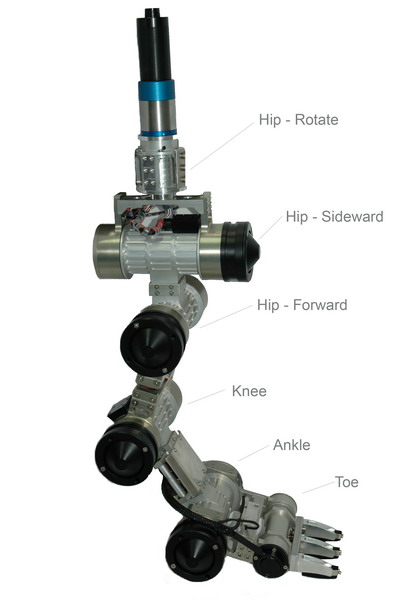
Der vierbeinige ARAMIES-Roboter besitzt 26 Gelenke: sechs pro Bein und zwei für die Bewegung des Kopfes. Dieser enthält eine Kamera, zwei Ultraschall-Abstandssensoren sowie einen 2D-Laserscanner. Zusätzlich verfügt der Roboter noch über Beschleunigungssensoren und ein Gyroskop zur Stabilitätskontrolle. Die Kontrolle der Gelenke wird mit Hilfe von absoluten Positionssensoren sowie Strom- und Temperatursensorik erreicht.
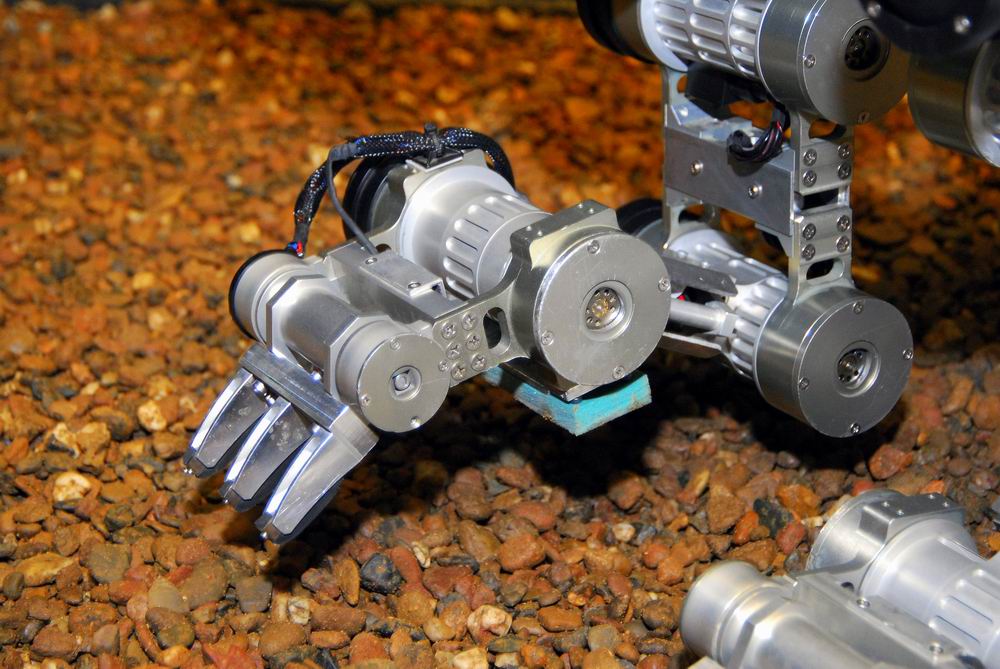
Ein großer Vorteil des ARAMIES-Roboters im Vergleich zu anderen Laufrobotern ist sein aktuierter Fuß, der es ihm ermöglicht, in steilem Gelände sicher Halt zu finden. In Labortests war der Roboter in der Lage, eine Sprossenwand mit einer Steigung von 70° zu bewältigen.
Jeder Fuß ist mit fünf Drucksensoren sowie einem nach unten gerichtetem Infrarot-Abstandssensor zur zuverlässigen Feststellung des Bodenkontaktes ausgestattet.
Die modulare Steuerungs- und Leistungselektronik besteht aus einem PC104-System für komplexe Navigations- und Planungsaufgaben, einer MPC565/FPGA-Platine für die reaktive, verhaltensbasierte Kontrolle und fünf Motorsteuerungsplatinen, die von je einem FPGA gesteuert werden. Jede dieser Platinen kann bis zu sechs Motoren gleichzeitig ansteuern und alle analogen Sensorsignale eines Beines einlesen. Unter Benutzung von LVDS-Kommunikation können bis zu acht der Motorsteuerungsplatinen an die MPC565/FPGA-Platine angeschlossen werden.
Videos
ARAMIES: Kletterfähigkeiten
ARAMIES besitzt 6 Gelenke in jedem Bein und zwei für den (mit Kamera, Laserscanner & Ultraschall-Abstandssensoren ausgestatteten) Kopf.