Video archive
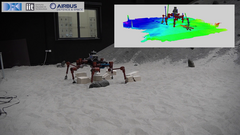
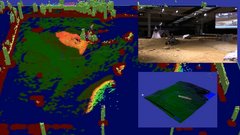
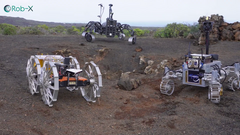
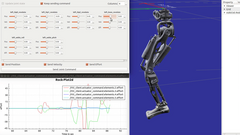
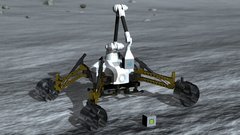
ANT: Navigation and guidance system enables robots to traverse rough, inclined, unconsolidated terrains. Final tests.
The work on the ANT guidance, navigation, and control system for future planetary exploration walking system has finished. The final tests proofed its capabilities on unconsolidated, unstructured, and inclined terrains. The visual foothold adaptation can rely on a high-frequent and drift-free pose estimation and on an up-to-date map. Therefore, contact-information are additionally added to the map to incorporate changed surface structures. In addition, a load bearing assessment can be performed to evaluate the stability of the next foothold before relying on it. This way, a stable recovery from collapse rock formations is possible, which can increase the safety of future legged exploration missions.