Video archive
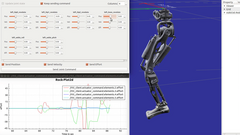
RH5 Manus: Robot Dance Generation based on Music Analysis Driven Trajectory Optimization
Musical dancing is an ubiquitous phenomenon in human society. Providing robots the ability to dance has the potential to make the human robot co-existence more acceptable. Hence, dancing robots have generated a considerable research interest in the recent years. In this paper, we present a novel formalization of robot dancing as planning and control of optimally timed actions based on beat timings and additional features extracted from the music. We showcase the use of this formulation in three different variations: with input of a human expert choreography, imitation of a predefined choreography, and automated generation of a novel choreography. Our method has been validated on four different musical pieces, both in simulation and on a real robot, using the upper-body humanoid robot RH5 Manus.