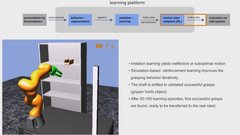
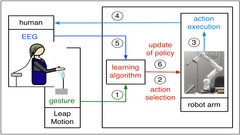
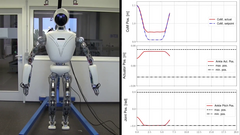
Thanks to human negative feedback, the robot learns from its own misconduct.
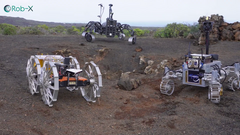
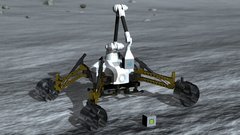
The rover Artemis, developed at the DFKI Robotics Innovation Center, has been equipped with a penetrometer that measures the soil's…
In cooperation with the producer of the TBMs, the company NFM Technologies, DFKI RIC will develop a robotic arm to inspect, clean and…
The DFKI Quad B12 robot is an exciting research platform under development in the Underactuated Lab at DFKI RIC. The video showcases a range…
This paper presents the design, analysis, and performance evaluation of RicMonk, a novel three-link brachiation robot equipped with passive…
The aim of the project is to design and develop a semi-autonomous, mobile system that is capable of harvesting fruit independent of human…
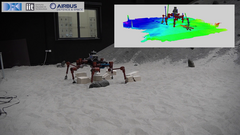
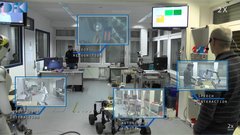
In the event of a disaster, every second counts. To save valuable time and increase the safety of emergency personnel, the DFKI Robotics…
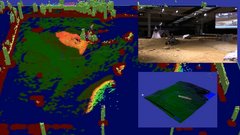
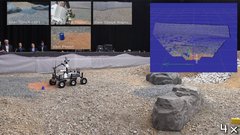
SherpaTT demonstrating its ability to keep ist body level during drives through rough terrain.