STARLIT
Smarte Automatisierungs- und Roboterwerkzeuge als modulare Lösungen im industriellen Raumfahrtbereich

On-Orbit Servicing (OOS) und In-Space Manufacturing (ISMA) Aufgaben bekommen einen immer größeren Stellenwert zugeschrieben. Dies gilt sowohl für die Institutionelle Raumfahrt wie auch privatwirtschaftliche Aktivitäten. Fast alle potenziellen OOS- und ISMA-Anwendungen erfordern die Fähigkeit mit Robotersystemen zu interagieren. Deshalb wurden in den letzten Jahren in Deutschland, Europa und International umfangreiche FuE-Aktivitäten vorangetrieben, um kompakte, leichte und universell einsetzbare Manipulatorarme für den orbitalen Einsatz zu entwickeln (z.B. ROKVISS, CAESAR, DEXARM, PIAP). Die architektonischen Konzepte und zugrunde liegenden Technologien für diese Systeme befinden sich daher in einem fortgeschrittenen Entwicklungsstadium. Werkzeuge, die am Endeffektor von Manipulatoren angebracht und bedient werden können um die eigentlichen Kontaktvorgänge wie Greifen, Schrauben, Nieten oder Durchsatzverbindungen durchzuführen, sind in der Regel weniger allgemein und für spezifische Operationen ausgelegt. Gegenstand des Projektes ist die Entwicklung eines intelligenten Endeffektors für orbitale Robotersysteme mit Manipulationsfähigkeit. Grundlage für diese Entwicklung stellt die Multi-Purpose-Tool (MPT) Werkzeugarchitektur der AIRBUS Defence and Space GmbH (ADS) dar. Kern dieser Architektur ist die Aufteilung der Werkzeuge in ein generisches Antriebs- und Avionik-Modul, sowie in die missions- und anwendungsspezifischen Werkzeugaufsätze. Diese Trennung ermöglicht die Entwicklung neuer Werkzeuge für spezielle technologische Operationen in kürzerer Zeit und mit einem geringeren Budget. Am DFKI erfolgte im Rahmen von STARLIT die Entwicklung und Evaluation von robotischen Greif-Werkzeugaufsätzen zur Befähigung robotischer Einheiten große Strukturen wie zB. Antennensegmente, im Orbit zu handhaben zu können und zu fertigen.
| Laufzeit: | 01.10.2021 bis 31.03.2023 |
| Zuwendungsempfänger: | Deutsches Forschungszentrum für Künstliche Intelligenz GmbH |
| Fördergeber: | Bundesministerium für Wirtschaft und Klimaschutz |
| Förderkennzeichen: | 50RA2119 |
| Partner: |
Airbus Defence and Space |
| Anwendungsfelder: | Weltraumrobotik |
| Verwandte Projekte: |
PULSAR (OG8)
Prototype of an Ultra Large Structure Assembly Robot
(02.2019-
03.2021)
PERIOD (OG12)
PERASPERA In-Orbit Demonstration (Operational Grant 12)
(01.2021-
12.2022)
|

Projektdetails



On-Orbit Servicing (OOS) und In-Space Manufacturing (ISMA) Aufgaben bekommen einen immer größeren Stellenwert zugeschrieben. Dies gilt sowohl für die Institutionelle Raumfahrt wie auch privatwirtschaftliche Aktivitäten. Fast alle potenziellen OOS- und ISMA-Anwendungen erfordern die Fähigkeit mit Robotersystemen zu interagieren. Deshalb wurden in den letzten Jahren in Deutschland, Europa und International umfangreiche FuE-Aktivitäten vorangetrieben, um kompakte, leichte und universell einsetzbare Manipulatorarme für den orbitalen Einsatz zu entwickeln (z.B. ROKVISS, CAESAR, DEXARM, PIAP). Die architektonischen Konzepte und zugrunde liegenden Technologien für diese Systeme befinden sich daher in einem fortgeschrittenen Entwicklungsstadium. Werkzeuge, die am Endeffektor von Manipulatoren angebracht und bedient werden können um die eigentlichen Kontaktvorgänge wie Greifen, Schrauben, Nieten oder Durchsatzverbindungen durchzuführen, sind in der Regel weniger allgemein und für spezifische Operationen ausgelegt. Gegenstand des Projektes ist die Entwicklung eines intelligenten Endeffektors für orbitale Robotersysteme mit Manipulationsfähigkeit. Grundlage für diese Entwicklung stellt die Multi-Purpose-Tool (MPT) Werkzeugarchitektur der AIRBUS Defence and Space GmbH (ADS) dar. Kern dieser Architektur ist die Aufteilung der Werkzeuge in ein generisches Antriebs- und Avionik-Modul, sowie in die missions- und anwendungsspezifischen Werkzeugaufsätze. Diese Trennung ermöglicht die Entwicklung neuer Werkzeuge für spezielle technologische Operationen in kürzerer Zeit und mit einem geringeren Budget.
Am DFKI erfolgte im Rahmen von STARLIT die Entwicklung und Evaluation von robotischen Greif-Werkzeugaufsätzen zur Befähigung robotischer Einheiten große Strukturen wie zB. Antennensegmente, im Orbit zu handhaben zu können und zu fertigen.
Dafür wurde innerhalb 2022 die Entwicklung eines proof-of-concept Mechanismus und dessen Teilqualifizierung im Bereich TRL 3-5 angestrebt. Die Werkzeugentwicklung findet in Anlehnung an das Vorhaben PERIOD statt, welches Teil des Weltraumforschungsclusters Horizon 2020 der Europäischen Union zur Technologieförderung in der Weltraumrobotik ist. Video 1 zeigt eine Studie zu dem geplanten Ablauf des On-Orbit Assemblies einer Antenne auf der Bartholomeo Plattform außerhalb der ISS.
Zur Umwandlung der Drehbewegung, welche über die Welle des MPTs zur Verfügung gestellt wurde, in eine translatorische Bewegung zum Greifen der Objekte wurden zunächst Kinematiken entwickelt, berechnet und verglichen. Dabei galt es Anforderungen wie, das Halten der Objekte bei einem Störungsfall oder den Ausgleich der Positionierungsungenauigkeiten des Manipulators zu berücksichtigen. Zu den funktionellen Anforderungen mussten zudem Umweltanforderungen, wie Vibrations- und Thermallasten, sowie auch der Einsatz unter Vakuum berücksichtig werden. Die Summe aus verfügbaren mechanisch geeigneten Komponenten, welche sich unter den genannten Anforderungen, bereits auch für die Anwendung im Weltraum qualifiziert haben oder zeitnah qualifizierbar sind, führte über die Kinematik Analyse zu einer Aufteilung der Werkzeuge in eine sogenannte Gripper Drive Unit (GDU) und den eigentlichen Endeffektoren. Eine direkte Nutzung der vom MPT erzeugten Drehbewegung war aus geometrischen und technischen Gründen nicht möglich.
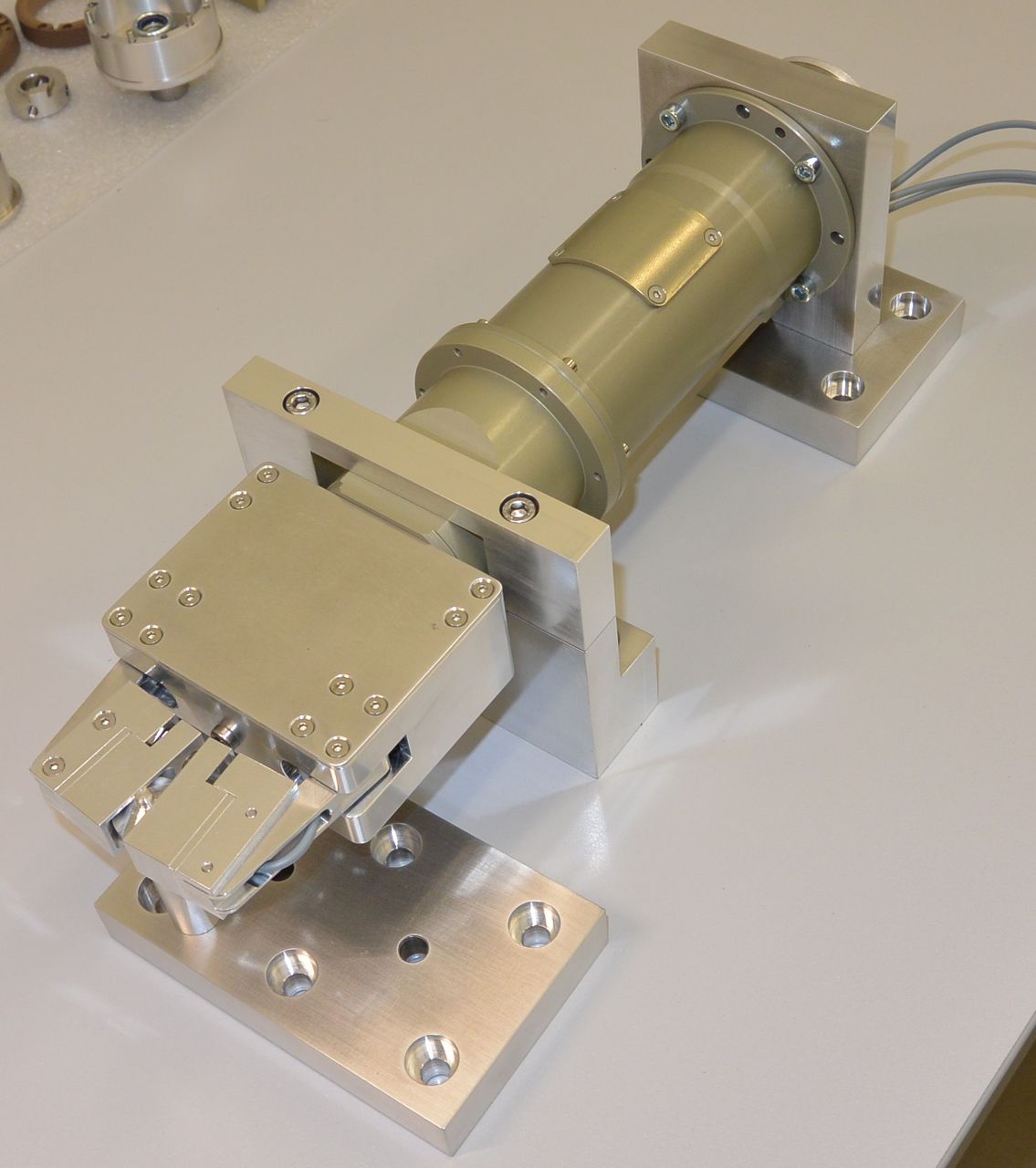
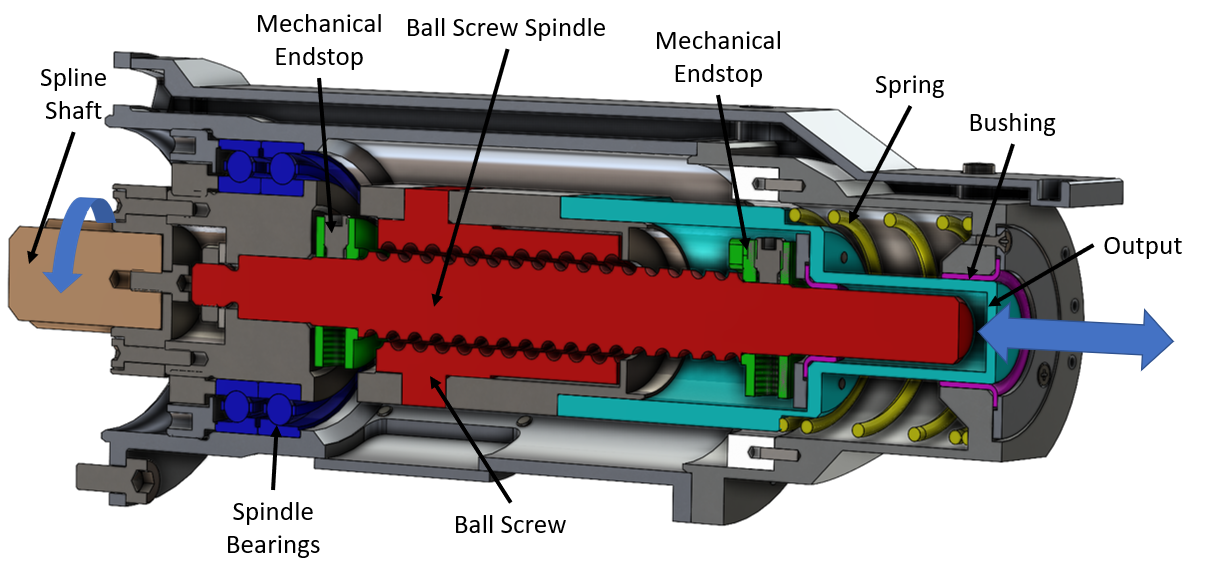
Die GDU (Abb. 1) wandelt dabei die Drehbewegung vom MPT in eine translatorische Bewegung und begrenzt gleichzeitig die Antriebswelle über verstellbare harte Anschläge, um die nachfolgenden Komponenten zu schützen. An ihr befindet sich ebenfalls ein Teil eines bereits erprobten Interface, dass das Wechseln der Werkzeuge im Orbit ermöglicht.
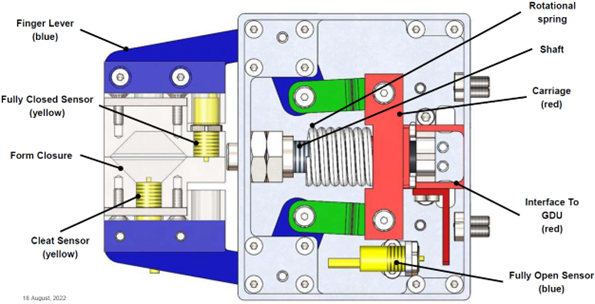
Als Endeffektoren wurden im Projekt StarLit zwei Werkzeugaufsätze entwickelt. Zum einen der Cleat Gripper (Abb. 2), welcher zum Greifen von Verbindungselementen dient und der Frame Gripper (Abb. 3), welcher 2-dimensionale Strukturen über eine definierte dreieckigen Geometrie greifen kann. Bei beiden Werkzeugaufsätzen wird der Schließvorgang von teils redundanten Federn angetrieben. Nur das Öffnen erfolgt aktiv über die GDU. Dies ermöglich auch im Störfall ein sicheres Halten des Objektes. Hinzu kommen Hebelmechanismen zum Einsatz, die beim Frame Gripper über eine geschickte Anordnung das Rücktreiben (öffnen durch Krafteinwirkung an den Greifbacken) verhindern und so für eine sichere Handhabung der Objekte sorgen. Es ist erwähnenswert, dass unter allen Umständen der Verlust von Objekten im Orbit vermieden werden muss, da dies unweigerlich zu höchst gefährlichen Weltraumschrott führen würde. Abbildung 4,5 und 6 zeigen den prinzipiellen Aufbau der Gripper Drive Unit und der Werkzeuge.
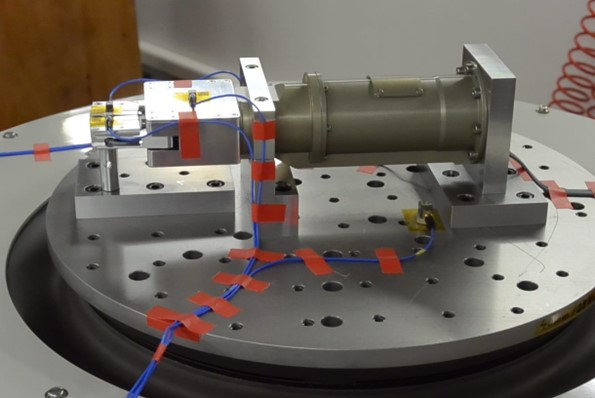
Komponenten Tests wurden bisher mit dem Cleat Gripper und die GDU durchgeführt. Abbildung 7 zeigt den Cleat Gripper bei den Vibration Loads Tests, welche nach ECSS-Spezifikation auf dem Shaker der Zarm Technik AG durchführt, wurden. Eine abschließende Qualifizierung kann erst bei feststehend der Startkonfiguration erfolgen. Die Werkzeuge sind auch bereits für einen Thermal-Vakuum Test ausgelegt und vorbereitet. Die Validierung der Werkzeuge erfolgt in operationellen Test bei unserem Partner Airbus Space and Defence in Bremen.
Es bleibt weiter spannend.