Inveritas
Innovative Technologien zur Relativnavigation (-bewegung) und Capture mobiler autonomer Systeme

Das Gesamtziel des INVERITAS Verbundprojektes ist die prototypische Realisierung eines breit einsetzbaren RendezVous und Capture (RvC) Systems und die Entwicklung der zugehörigen Kerntechnologien im Sinne des Anhebens des jeweiligen Technology Readiness Levels (TRL) bis hin zur Demonstration am Boden (TRL 4). Die Aufgaben des DFKI RICs in diesem Projekt liegen primär im Bereich RvC Evaluierung & Simulation in Hardware und Software.
| Laufzeit: | 01.05.2009 bis 31.03.2012 |
| Zuwendungsempfänger: | Deutsches Forschungszentrum für Künstliche Intelligenz GmbH |
| Fördergeber: |
Deutsches Zentrum für Luft- und Raumfahrt e.V.
Bundesministerium für Wirtschaft und Technologie |
| Förderkennzeichen: | Gefördert von der Raumfahrt-Agentur des Deutschen Zentrums für Luft- und Raumfahrt e.V. mit Mitteln des Bundesministeriums für Wirtschaft und Technologie aufgrund eines Beschlusses des Deutschen Bundestages unter dem Förderkennzeichen 50RA0910. |
| Partner: | EADS Astrium |
| Anwendungsfelder: | Weltraumrobotik |
| Verwandte Robotersysteme: |
KUKA KR 60
KUKA KR 60-3 Roboter Arm
SpiderCam
SpiderCam Kabel Roboter
KUKA KR 60
KUKA KR 60-3 Robotic arm
SpiderCam
SpiderCam Cable Robot
|


Projektdetails

INVERITAS ist ein Verbundprojekt zwischen den Projektpartnern EADS-ASTRIUM, Jena-Optronik und dem Robotics Innovation Center des Deutschen Forschungszentrums für Künstliche Intelligenz (RIC DFKI Bremen).
Das Gesamtziel des INVERITAS Verbundprojektes ist die prototypische Realisierung eines breit einsetzbaren Rendez-Vous und Capture (RvC) Systems und die Entwicklung der zugehörigen Kerntechnologien im Sinne des Anhebens des jeweiligen Technology Readiness Level (TRL) bis zur Demonstration am Boden (TRL 4). Entwickelt werden sollen alle Technologien, die notwendig sind, um einen Capture-Satelliten zu bauen, der in der Lage ist, andere auch durch Ausfälle möglicherweise unkooperative Satelliten im Orbit einzufangen und dann Wartungsarbeiten wie Betanken, Bahnänderungen etc. durchzuführen.
Die Aufgaben des DFKI RIC in INVERITAS beschäftigen sich primär mit dem Aufbau eines Langstreckenbewegungssimulationsystems (LBSS) in Hard- und Software sowie der Entwicklung von alternativen Greifmöglichkeiten.
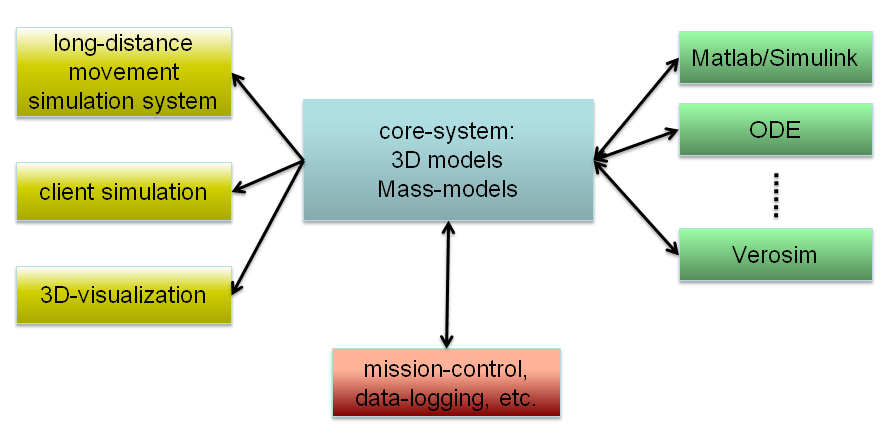
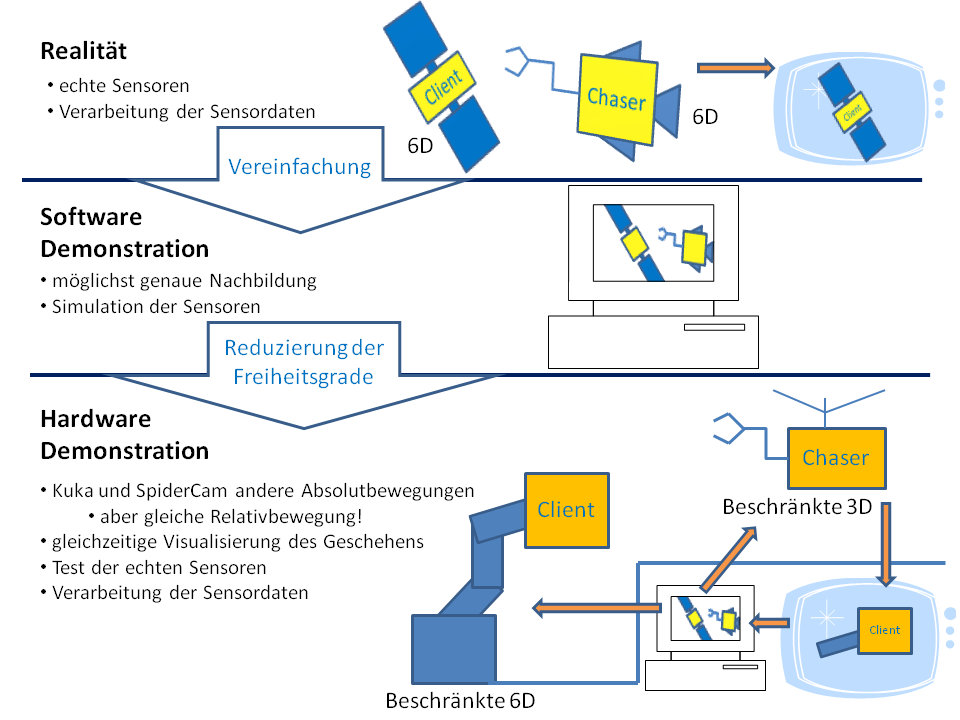
Das LBSS wird dabei direkt mit einem neu entwickelten modularen Software-Simulator und einer 3D Visualisierung gekoppelt. Es wird möglich sein, verschiedene Arten der Bahnsteuerung eines Capture-Satelliten und des Clients zu implementieren und zu evaluieren. Die im Software-Simulator gewonnenen Erkenntnisse können dann schrittweise auf das physisch existente LBSS übertragen werden. So wird sichergestellt, dass Software und Hardware die gleichen Ergebnisse liefern.
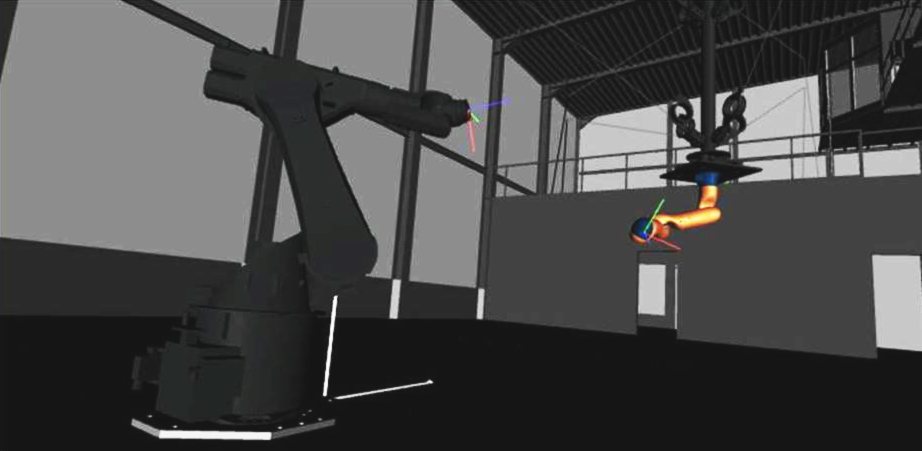
Die physischen Technologiedemonstratoren für den Capture-Satelliten und für den Klienten werden durch einen Sechs-Achsen-Roboter und durch ein seilgeführtes 3D-Bewegungsystem zum LBSS zusammengeführt. Bei der Übertragung der Simulationsergebnisse auf das LBSS werden die insgesamt 12 Freiheitsgrade des realen Capture-Satelliten und des Clients auf die eingeschränkten insgesamt 9 Freiheitsgrade des Roboters und des seilgeführten Bewegungssystems umgesetzt. Das LBSS selbst wird in einer Umgebung aufgebaut, in der eine komplette Kontrolle der Lichtverhältnisse möglich ist. Dadurch können bis auf die reduzierte Schwerkraft und den niedrigeren Atmosphärendruck alle physikalischen Parameter eines RvC-Vorgangs simuliert, evaluiert und demonstriert werden.
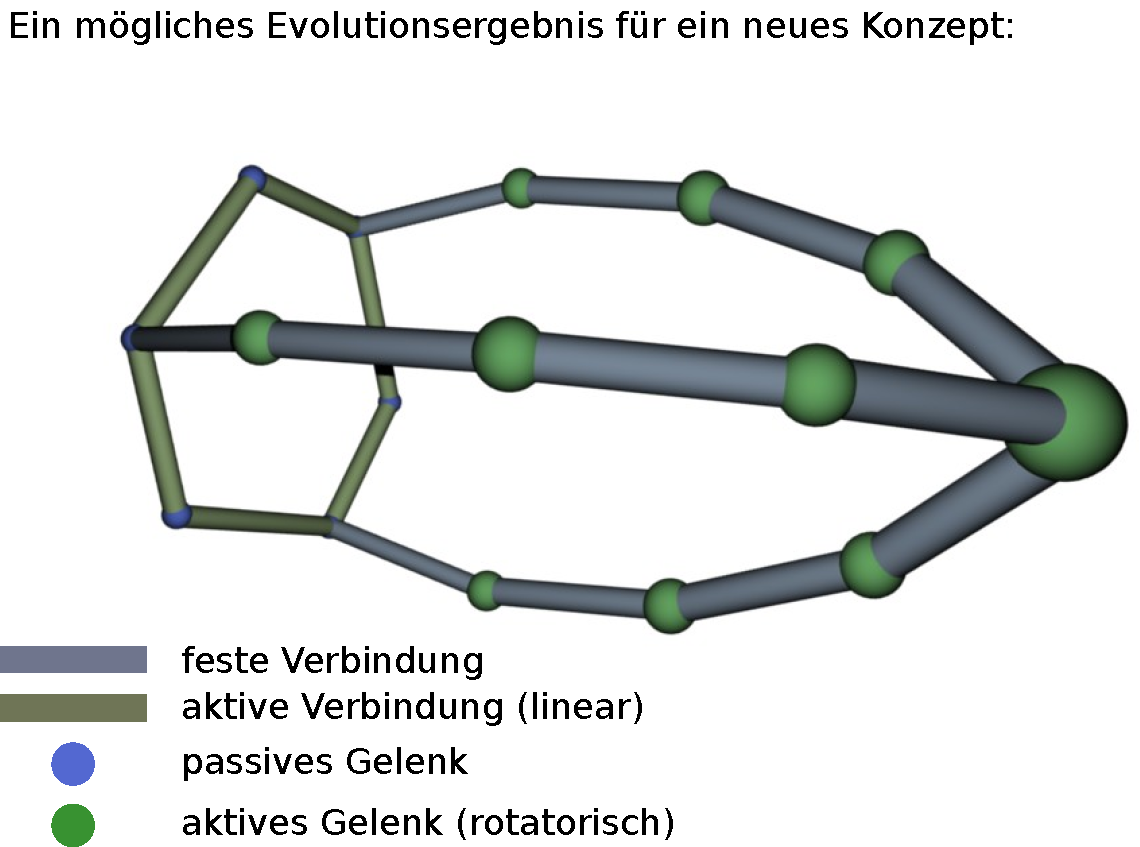
Das Simulationssystem wird auch zur Entwicklung von alternativen Greifmöglichkeiten verwendet. In der Simulation sollen mit Hilfe von genetischen Algorithmen verschiedene neuartige Kinematiken und Greifstrategien evolviert und danach evaluiert werden.
Videos
Inveritas: On orbit servicing Testumgebung

Autonome Reaktion des CableRobots auf die Bewegung des Roboterarms.
Inveritas: Relativnavigation und Capture

Die prototypische Realisierung eines breit einsetzbaren RendezVous und Capture Systems.