go!Cart
Initialprojekt für competitive aerial robot technologies

Ziel des Initialprojekts go!CART ist die Vorbereitung eines Kompetenznetzwerkes im Bereich ziviler Flugroboter. Die zivilen Anwendungsfelder solcher Flugroboter sind vielseitig und reichen von Verkehrsüberwachung, Inspektion von Offshore Anlagen oder Windkraftanlagen bis hin zu Einsätzen im Katastrophenschutz und bei der Feuerwehr. Flugroboter können dort zur Lageeinschätzung durch ihre Möglichkeit, Videobilder und weitere Messdaten online zu übertragen, beitragen und so sinnvoll die Einsatzkräfte unterstützen.
| Laufzeit: | 01.05.2008 bis 31.12.2010 |
| Zuwendungsempfänger: | Deutsches Forschungszentrum für Künstliche Intelligenz GmbH |
| Fördergeber: |
WFB Wirtschaftsförderung Bremen GmbH
Europäische Union |
| Partner: | Rheinmetall Defence Electronics GmbH, Hochschule Bremen Oldenburger Forschungs- und Entwicklungsinstitut für Informatik-Werkzeuge und -Systeme (OFFIS), Deutsches Zentrum für Luft- und Raumfahrt e.V., Deutsche Flugsicherung GmbH, CebeNetwork GmbH, Haindl Ku |
| Anwendungsfelder: | SAR- & Sicherheitsrobotik |


Projektdetails
Die Teilziele des Projektes go!Cart umfassen im Einzelnen:
- Etablierung eines Flugrobotik-Netzwerkes
- Schaffung eines Flugrobotik-Technologie-Pools
- Realisierung von Flugroboterprotoypen
- Durchführung von Pilotaneendungen
- Entwurf eines Flugrobotik-Regelwerkes zum Einsatz im zivilen Luftraum
Im Rahmen des Projektes werden fliegende Systeme und Komponente für den Einsatz von Flugrobotern entwickelt. Das DFKI RIC Bremen beteiligt sich mit der Entwicklung von Komponenten, die für den Betrieb eines Flugroboters unerlässlich sind:
- Inertialmessplattform und Sensoreinheit zur Zustandsschätzung
- Netzwerk zur effizienten Verbindung von Sensoren und Aktuatoren auf einem Flugroboter
- Missionsplaner zur Planung von Flugvorhaben
- Kommunikationsverbindung zwischen Flugroboter und Bodenstation zur Übertragung auch grösserer Datenmengen
Zustandsschätzung:
Moderne Mikroelektronik bietet für die Fluginstrumentierung eine kostengünstige Alternative, insbesondere bei den Gewichtsgrenzen, denen ein Flugroboter ausgesetzt ist. Das DFKI RIC entwickelt hierzu eine Inertialmessplattform zur Zustandsschätzung. Durch geeignete Filter- und Berechnungsverfahren soll mit Standardbauteilen eine ausreichende Genauigkeit erzielt werden. Weitere Sensoren wie Kameras und GPS sollen ebenfalls eingebunden werden.
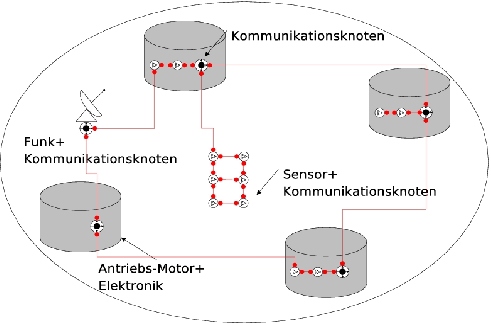
Sensor-/Aktuatornetzwerk:
Es wird eine Netzwerktechnologie entwickelt, die es erlaubt Sensoren und Aktuatoren eines Flugroboter effizient zu vernetzen. Der entstehende Routingaufwand wird durch den Aufbau des Protokolls und unter Berücksichtigung der Netzwerktopolgie gering gehalten.
Missionsplaner:
Ein Missionsplaner stellt eine Softwaremodul da, dass mit wenigen Eingaben eine komplettes Flugvorhaben optimal plant und dabei gegebene Regeln einhält.
DatenLink:
Ein Flugroboter ist eine einmalige Plattform für Sensoren aller Art. Das bedingt auch, dass eine grosse Menge Daten vom Flugroboter über eine Verbindung variabler Qualität zum Boden geschickt werden muss. Das DFKI RIC Bremen entwickelt hierzu ein Softwaremodul, um die Datenströme mehrere Quellen über diese Verbindung zu senden.