Videoarchiv
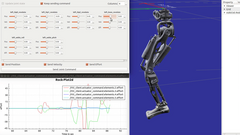
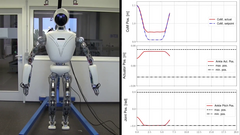
Charlie: Verhalten zum Wiederaufrichten des Laufroboters
Das Video zeigt ein selbstaufrichtendes Verhalten des vierbeinigen Laufroboters Charlie, der vom Robotics Innovation Center (RIC) des DFKI entwickelt wurde. Das Verhalten besteht aus zwei Teilen: 1. einem Übergang von einer liegenden in eine liegende Position und 2. dem anschließenden Übergang in eine stehende Position, wobei die künstliche 6 DoF-Wirbelsäule von Charlie der Schlüssel zum Erreichen der stabilen vierbeinigen Position war.