Videoarchiv
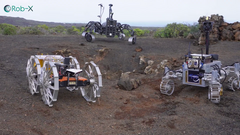
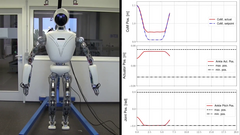
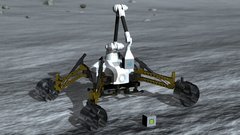
ANT: Navigations- und Leitsystem ermöglicht es Robotern, unwegsames, geneigtes und unbefestigtes Gelände zu durchqueren. Abschließende Tests.
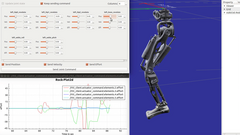
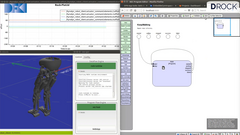
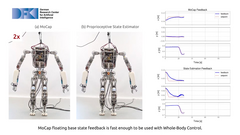
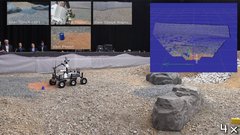
Die Arbeiten am ANT Lenkungs-, Navigations- und Kontrollsystem für zukünftige Laufroboter zur Planetenerkundung sind abgeschlossen. In den abschließenden Tests wurden seine Fähigkeiten auf unbefestigtem, unstrukturiertem und geneigtem Gelände unter Beweis gestellt. Die visuelle Fußanpassung kann sich auf eine hochfrequente und driftfreie Posenschätzung und auf eine aktuelle Karte stützen. Dazu werden der Karte zusätzlich Kontaktinformationen hinzugefügt, um veränderte Oberflächenstrukturen einzubeziehen. Darüber hinaus kann eine Tragfähigkeitsbewertung durchgeführt werden, um die Stabilität des nächsten Standplatzes zu beurteilen, bevor man sich auf ihn verlässt. Auf diese Weise ist eine stabile Bergung aus eingestürzten Gesteinsformationen möglich, was die Sicherheit zukünftiger beinloser Erkundungsmissionen erhöhen kann.