Videoarchiv
CIAM: Erkundung der Herausforderungen von Andockvorgängen mit einem ferngesteuerten AUV
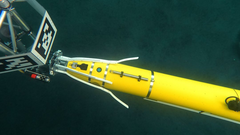
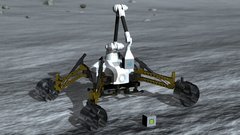
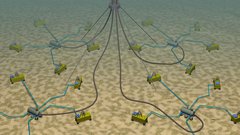
Autonome Unterwasserfahrzeuge (AUVs) werden bereits zur Inspektion von Strukturen in tiefen Gewässern eingesetzt. Noch werden die Systeme jedoch von großen Versorgungsschiffen begleitet, auf See ausgesetzt und wieder eingeholt - ein riskantes und zugleich kostspieliges Unterfangen. Gemeinsam mit Partnern aus Industrie und Forschung entwickelt das DFKI im Verbundprojekt CIAM ("Cooperative Development of a Comprehensive Integrated Autonomous Underwater Monitoring Solution") intelligente AUVs. Diese Systeme sind in der Lage, große Entfernungen zu überwinden und Tiefseeanlagen an verschiedenen Standorten zu überwachen, ohne dass zusätzliche Schiffe eingesetzt werden müssen. Die Energieversorgung (und perspektivisch auch das Auffangen liegengebliebener Unterwasserfahrzeuge sowie der Informationsaustausch) soll durch angetriebene Ladestationen sichergestellt werden, die je nach Bedarf ausgesandt werden und autonom an die Systeme andocken können.
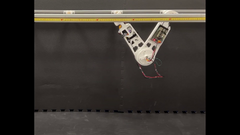
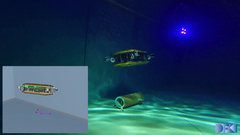
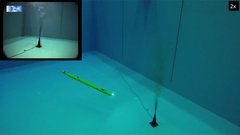
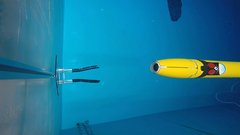
Das Video zeigt Versuche im großen Salzwasserbecken der Maritimen Forschungshalle des DFKI in Bremen. Bis die eigentliche Hardware zur Verfügung steht, dient das technisch ähnlich ausgestattete AUV Cuttlefish als Platzhalter für die Ladestation und das Rohr als Platzhalter für das Zielfahrzeug. Der Andockvorgang, der hier noch manuell erfolgt, ist selbst in ruhigen Gewässern ein hochkomplexer Vorgang. Um im Nachhinein zu überprüfen, wie genau dieser Vorgang funktioniert hat, können die Positionen des Tintenfisches und der Röhre mit Hilfe eines Qualisys Motion-Tracking-Systems live verfolgt werden. Dazu werden mehrere reflektierende Kugeln an den Oberflächen der Systeme angebracht, die von insgesamt zwölf Kameras mit UV-Strahlern verfolgt werden können.