Videoarchiv
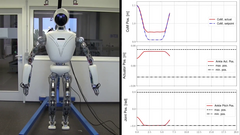
RH5 Manus: Robotertanzgenerierung basierend auf musikanalysegesteuerter Trajektorienoptimierung
Musikalisches Tanzen ist ein allgegenwärtiges Phänomen in der menschlichen Gesellschaft. Die Fähigkeit von Robotern zu tanzen hat das Potenzial, die Koexistenz von Mensch und Roboter akzeptabler zu machen. Daher haben tanzende Roboter in den letzten Jahren ein erhebliches Forschungsinteresse geweckt. In diesem Beitrag stellen wir eine neuartige Formalisierung des Robotertanzes als Planung und Steuerung von optimal getakteten Aktionen vor, die auf
Taktzeiten und zusätzlichen, aus der Musik extrahierten Merkmalen. Wir zeigen die Anwendung dieser Formulierung in drei verschiedenen Varianten: mit der Eingabe einer Choreografie durch einen menschlichen Experten, der Imitation einer vordefinierten Choreografie und der automatischen Generierung einer neuen Choreografie. Unsere Methode wurde an vier verschiedenen Musikstücken validiert, sowohl in der Simulation als auch an einem realen Roboter, dem humanoiden Oberkörperroboter RH5 Manus.