Videoarchiv
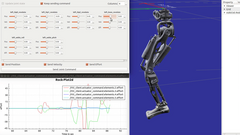
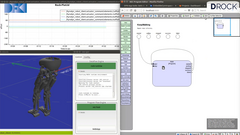
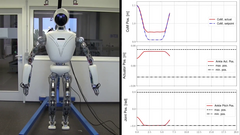
RH5: Entwurf, Analyse und Steuerung des Serien-Parallel-Hybridroboters RH5 Humanoid
In diesem Beitrag wird ein neuartiger seriell-paralleler Hybrid-Humanoid namens RH5 vorgestellt, der 2 m groß ist und nur 62,5 kg wiegt und in der Lage ist, schwere dynamische Aufgaben mit 5 kg Nutzlast in jeder Hand auszuführen. Die Analyse und Steuerung dieses Humanoiden wird mit einer Ganzkörper-Trajektorien-Optimierungstechnik durchgeführt, die auf differentieller dynamischer Programmierung (DDP) basiert. Zusätzlich stellen wir einen verbesserten kontaktstabilitätsabhängigen DDP-Algorithmus vor, der in der Lage ist, physikalisch konsistente Lauftrajektorien für den Humanoiden zu generieren, die über eine einfache PD-Positionskontrolle in einem Physiksimulator verfolgt werden können. Schließlich präsentieren wir erste experimentelle Ergebnisse mit dem humanoiden Roboter RH5.