Die 20 neuesten Videos
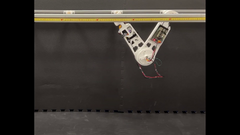
RicMonk: kurzer Teaser
In diesem Beitrag werden das Design, die Analyse und die Leistungsbewertung von RicMonk vorgestellt, einem neuartigen dreigliedrigen Hangelroboter, der mit passiven hakenförmigen Greifern ausgestattet ist. Das Hangeln, eine wendige und energieeffiziente Art der Fortbewegung, die bei Primaten beobachtet wird, hat die Entwicklung von RicMonk inspiriert, um vielseitige Fortbewegung und Manöver auf leiterartigen Strukturen zu erforschen. Die anatomische Ähnlichkeit des Roboters mit Gibbons und die Integration eines Schwanzmechanismus zur Energiezufuhr tragen zu seinen einzigartigen Fähigkeiten bei. Der Beitrag beschreibt die Verwendung der Methode der direkten Kollokation zur Optimierung der Trajektorien für das dynamische Verhalten des Roboters und die Stabilisierung dieser Trajektorien mithilfe eines zeitvariablen linearen quadratischen Reglers. Mit RicMonk demonstrieren wir bidirektionales Hangeln und bieten eine vergleichende Analyse mit seinem Vorgänger AcroMonk, einem zweigliedrigen Hangelroboter, um zu zeigen, dass das Vorhandensein eines passiven Schwanzes die Energieeffizienz verbessert. Das Systemdesign, die Steuerungen und die Software-Implementierung sind auf GitHub öffentlich zugänglich.