Teams des Robotics Innovation Centers
Unter dem langfristigen Ziel „Long Term Autonomy“ beschäftigt sich das Robotics Innovation Center (RIC) am Deutschen Forschungszentrum für Künstliche Intelligenz mit der Frage, wie intelligentes Verhalten von technischen Systemen in komplexen und dynamischen Umgebungen nachhaltig über lange Zeiträume – Monate und Jahre – realisiert werden kann.
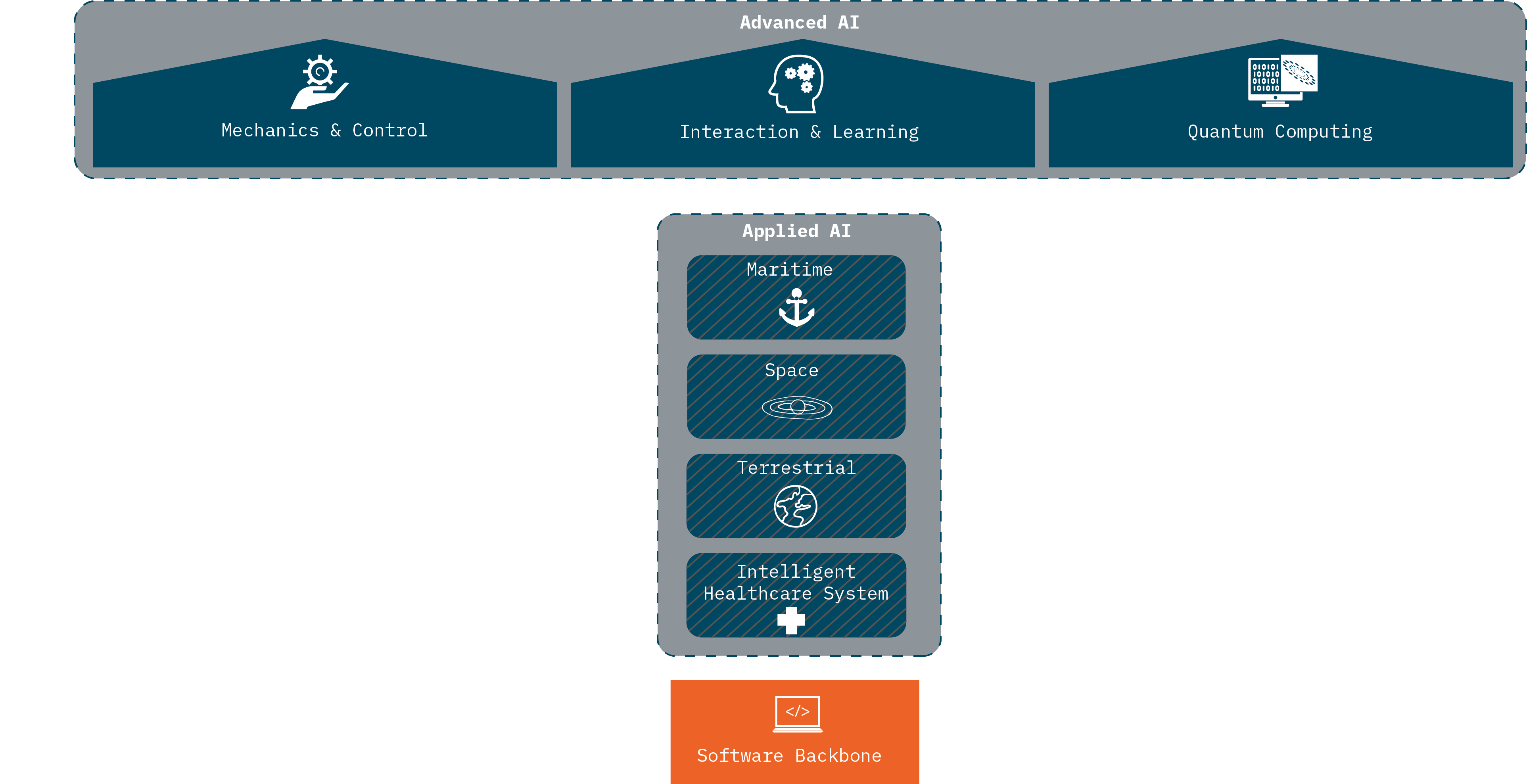
Diese Vision verfolgt der Forschungsbereich in den vier grundlagenorientierten Teams (Advanced AI) "Mechanics & Control", "Quantum Computing" und "Interaction & Learning", die durch neue wissenschaftliche Erkenntnisse die Robotik-Forschung entscheidend voranbringen sollen.
Die vier anwendungsorientieren Teams (Applied AI) "Maritime", "Space", "Terrestrial" und "Intelligent HealthCare Systems" nutzen die gewonnen Erkenntnisse und übertragen sie in konkrete Anwendungsbereiche. Dabei werden sie von dem Backbone "Software" unterstützt, welcher für die Entwicklung, Bereitstellung und Qualitätssicherung benötigter Softwarekomponenten zuständig ist.