MANTIS
Multi-legged Manipulation and Locomotion System

{kind=link}
Technical Details
| Size: | 2,96 m x 1,84 m x 0,32 m (locomotion posture) |
| Weight: | Approx. 236 lbs |
| Power supply: |
LiPo primary battery: 45,6 V and 10 Ah
|
| Speed: | Approx. 2,2 mph |
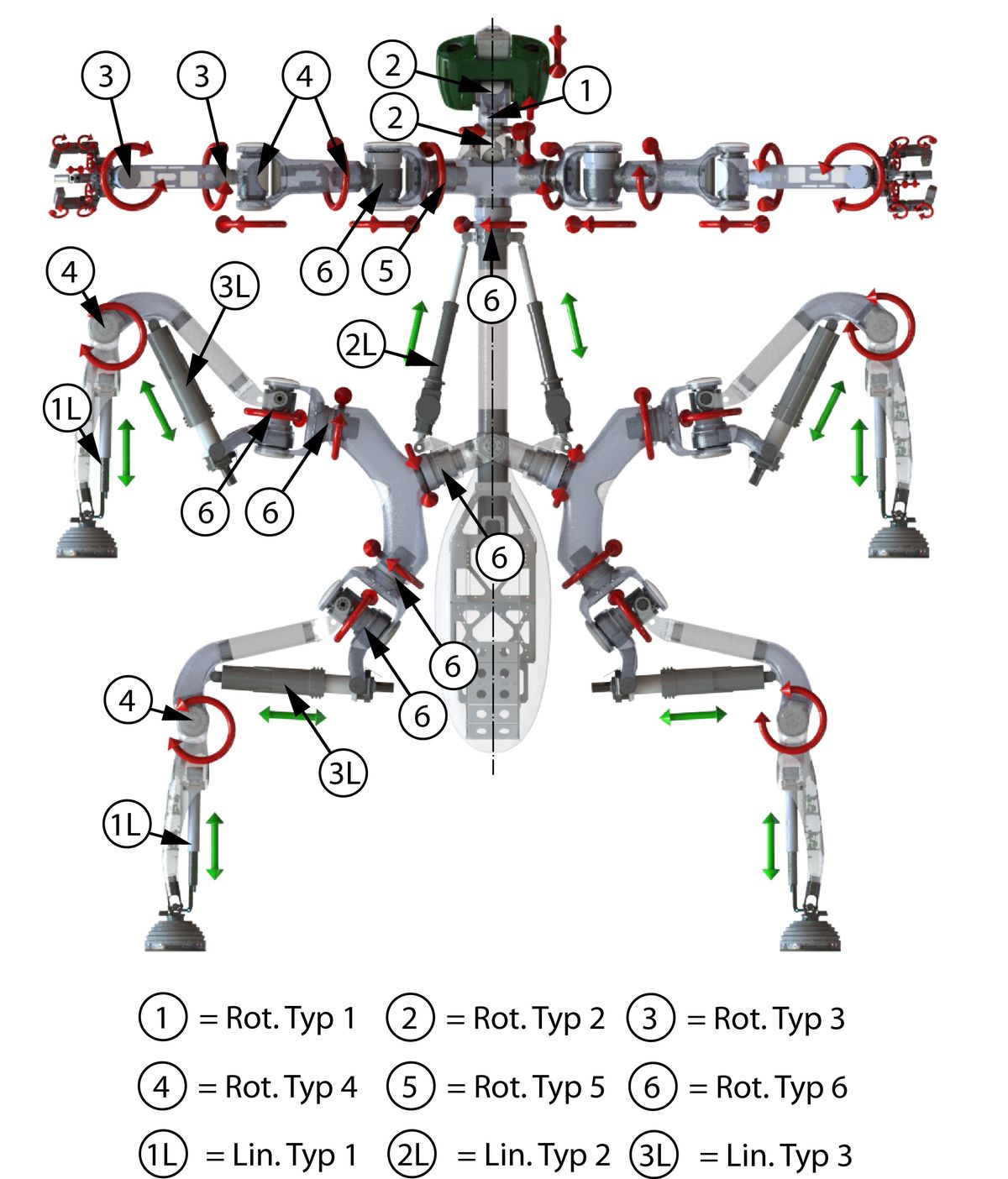
| Actuation/ Engine: |
- Legs: 4 x 6-DOF
- Arms: 2 x 6-DOF
- Hands: 2 x 8-DOF
- Torso: 5-DOF
- Head: 4-DOF
- Rotational actuators within the arms, legs and head: Brushless DC motors with Harmonic Drive gear
- Linear actuators within the legs: Brushless DC motors with
ball screw
- Linear actuators within the torso: DC motors with planetary gear and trapezoidal screw drive
|
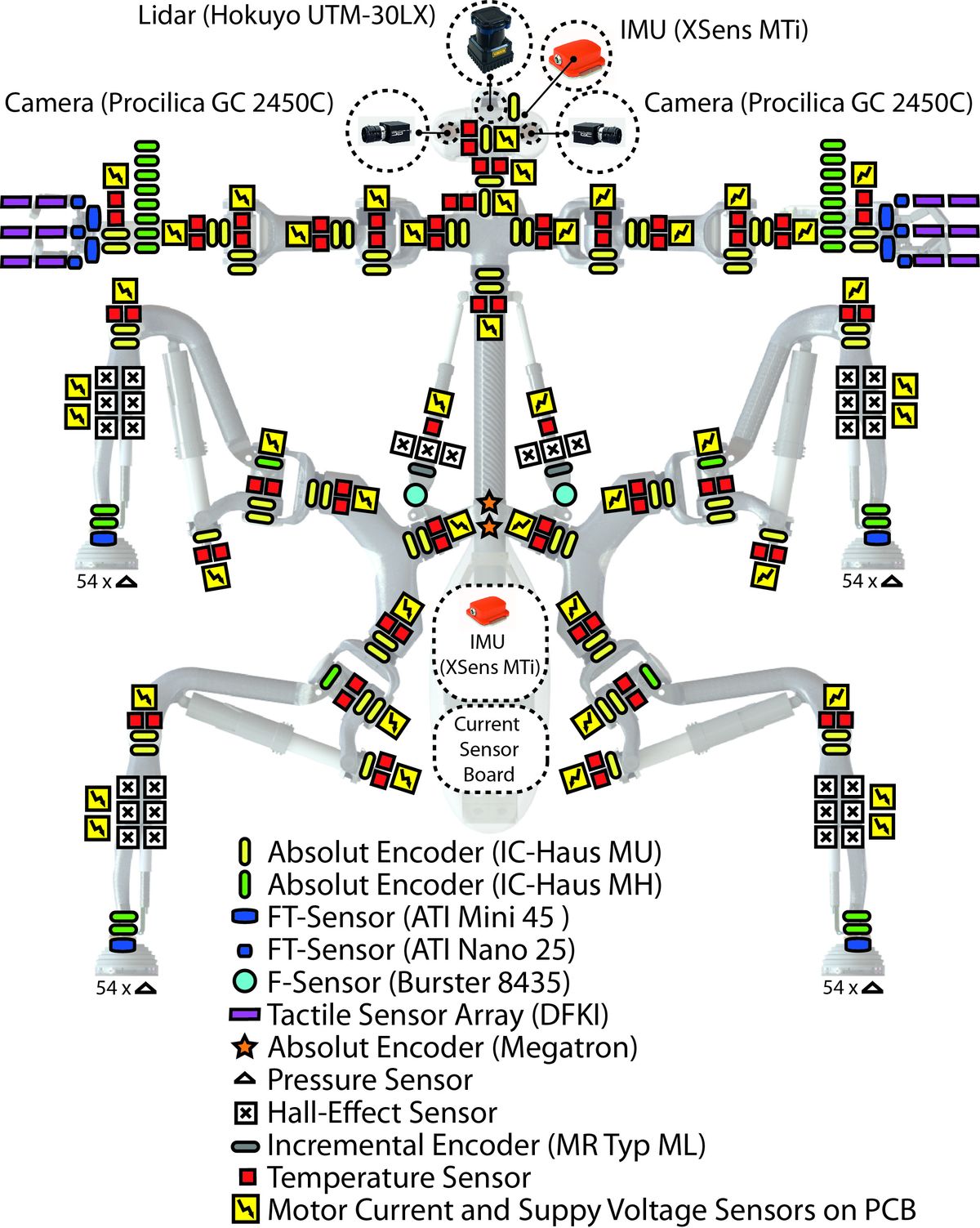
| Sensors: |
- Laser range finder: Hokuyo UTM-30LX
- Stereo camara system: 2 x Procillica GV 2450C
- IMU: -IMU: 2 x XSens MTi
- 122 temperature sensors
- 191 current sensors
- 12 tactile sensor arrays with 40 sensing elements
- 88 rotational absolut encoder
- 14 six axes force-torque-sensor
|
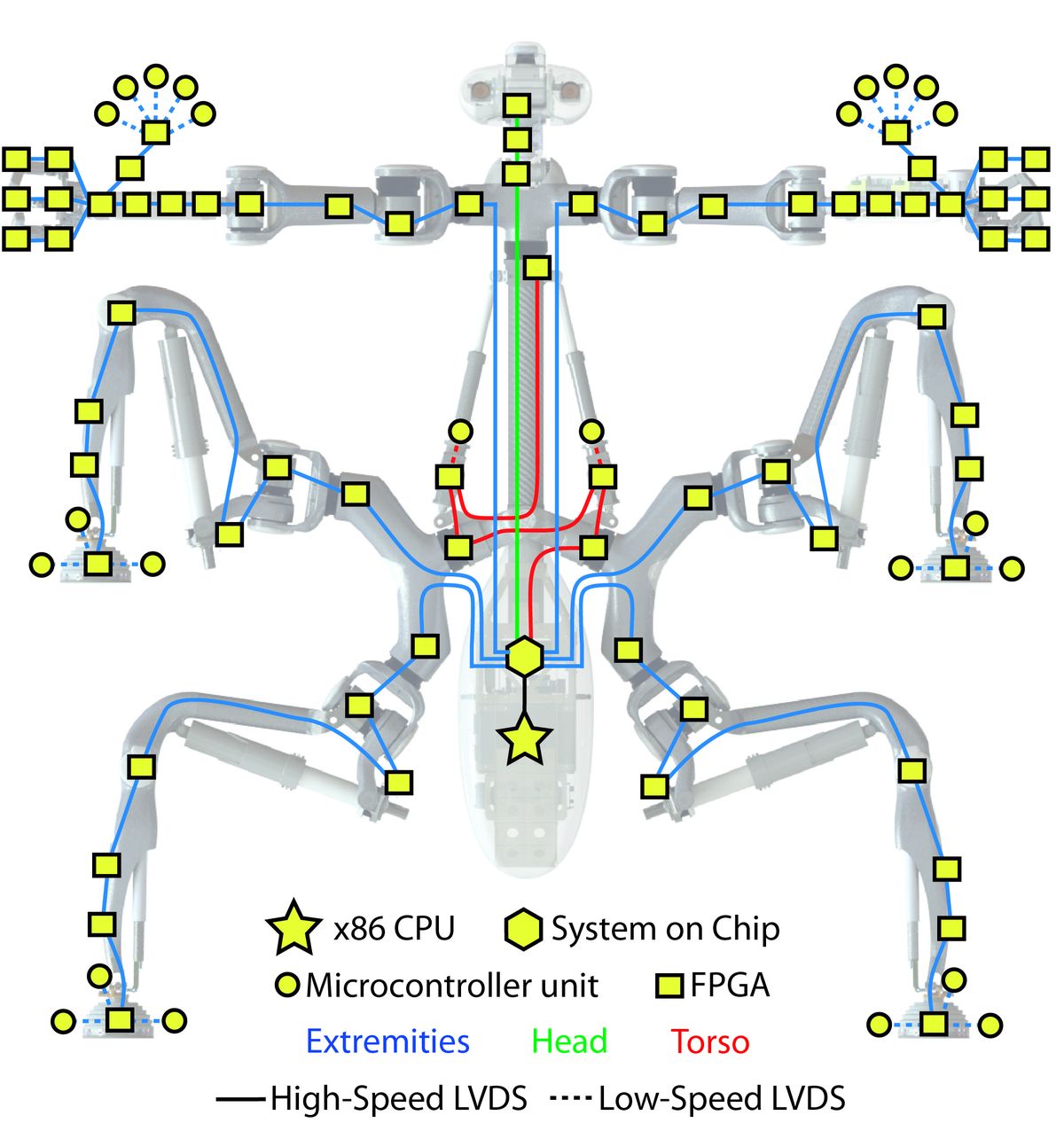
| Communication: |
Independent LVDS chains for the control of both arms, the four legs, the torso and the head.
|
| Motorelektronik: |
DFKI electronic stack for all drives:
- Input voltage: 12V-54V
- FPGA- Spartan 6:XC6SLX45
- Serial communication for Spartan-6 (320MSym/s)
- Sinusoidal commutation
- 2 x LVDS for local sensors
- 2 x Ports for IC Haus MU sensors
- 4 x Status LED via plug
|
Organisational Details |
|
| Partner: | University Bremen |
| Sponsor: |
Federal Ministry for Economic Affairs and Climate Action
German Aerospace Center e.V. |
| Grant number: | This project is funded by the German Space Agency (DLR Agentur) with federal funds of the Federal Ministry for Economic Affairs and Climate Action (BMWi) in accordance with the parliamentary resolution of the German Parliament, grant no. 50 RA 1218. |
| Application Field: |
Space Robotics
SAR- & Security Robotics Logistics, Production and Consumer |
| Related Projects: |
PRO-ACT (OG11)
Planetary RObots Deployed for Assembly and Construction Tasks
(02.2019- 04.2021)
BesMan
Behaviors for Mobile Manipulation
(05.2012- 07.2016)
D-Rock
Models, methods and tools for the model based software development of robots
(06.2015- 05.2018)
LIMES
Learning Intelligent Motions for Kinematically Complex Robots for Exploration in Space
(05.2012- 04.2016)
|
| Related Robots: |
SpaceClimber
Expandable Rover for Planetary Applications
Charlie
iStruct Demonstrator
|
| Related Software: |
Bagel
Biologically inspired Graph-Based Language
MARS
Machina Arte Robotum Simulans
Phobos
An add-on for Blender allowing editing and exporting of robots for the MARS simulation
Rock
Robot Construction Kit
|


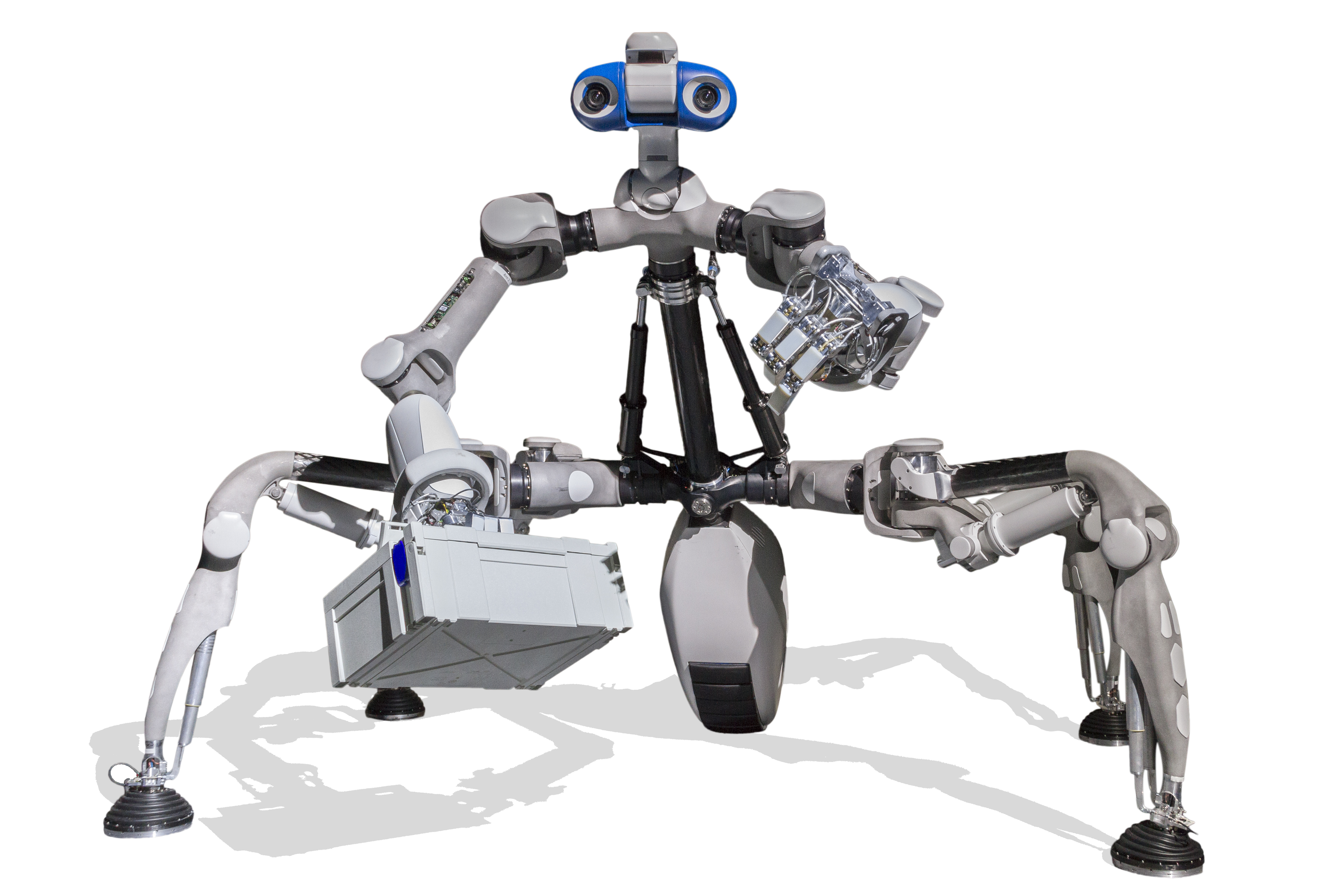
System description
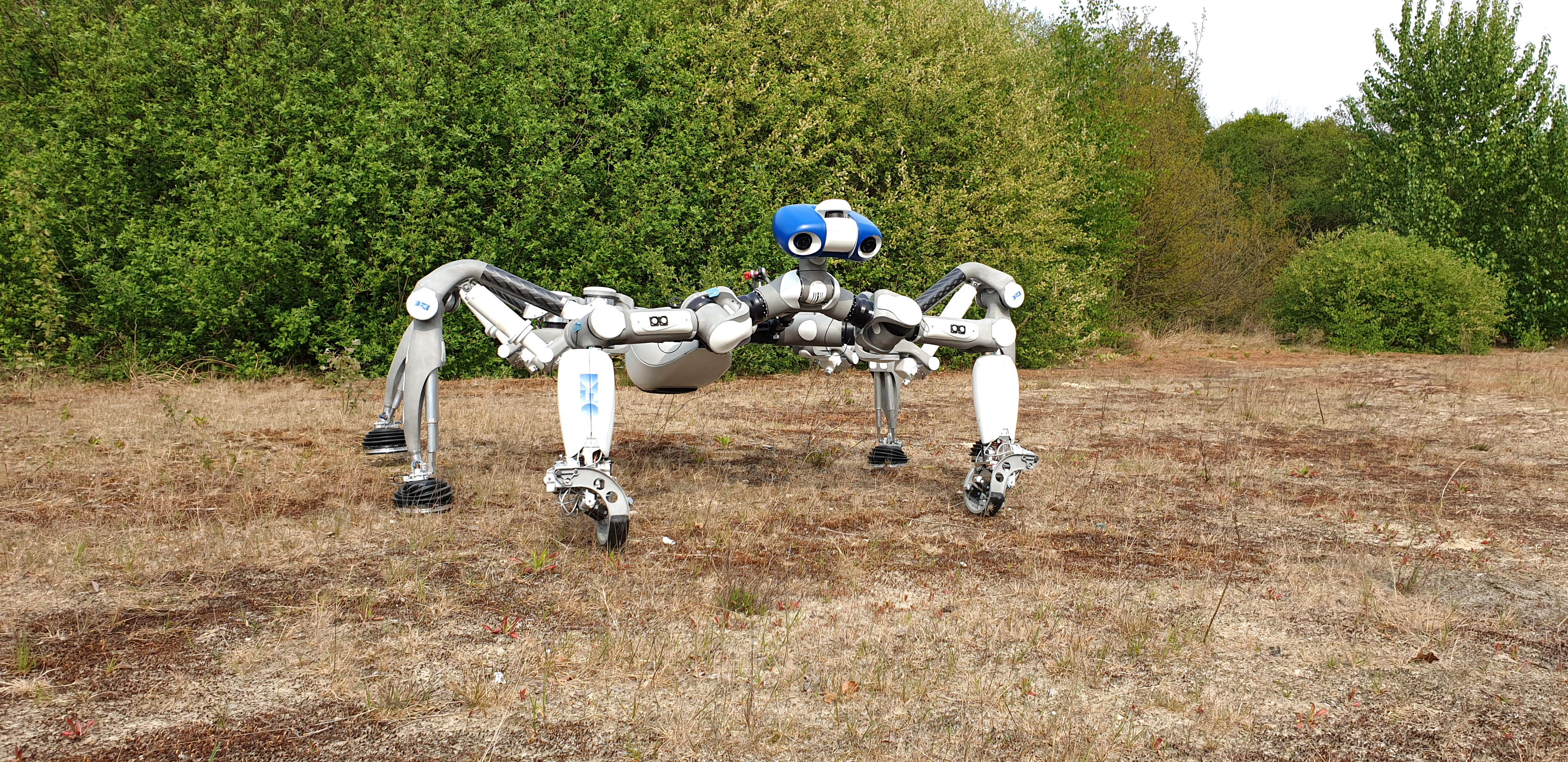

MANTIS is a multi-legged robot with six extremities. The system was developed as a platform for interdisciplinary research in the area of mobile manipulation with multi-legged robots. To fulfill a variety of different tasks the robot is capable of operating in two different postures. In the manipulation posture MANTIS uses the four rear legs for locomotion and the two front legs for manipulation. Furthermore, in the locomotion posture the robot walks on all six extremities, which is a big advantage in difficult terrain. This flexibility allows to solve complex scenarios with only one system. Several software components as well as planning methods can be evaluated within such scenarios.
MANTIS is designed as an autonomous system with an integrated power source, a Mini ITX computer and the DFKI ZynqBrain which serves as central control unit for the robot as well as several FPGA-processing units and microcontrollers distributed across the robot are used for decentralized data pre-processing and control of subsystems. For the purpose of perception, the robot is equipped with pressure sensors in the sole of each foot, tactile sensor arrays in the fingers, a stereo camera system, a scanning laser range finder and inertial measurement units in the head and abdomen. The system is furthermore equipped with current, voltage, temperature, acceleration, position, force and torque sensors to monitor the internal status.
The robot MANTIS is being developed within the project LIMES. This research aims to generate and optimize different locomotion behaviors for different situations. Machine learning methods are used to learn different behaviors which are tested in the simulation environment MARS and evaluated afterwards on the real system. The acquired set of locomotion behaviors is used and adjusted one the real system to adapt to the current environment and tasks.
In the project BesMan, the system is used to study two-arm manipulation behaviors, which were generated by the use of new methods for imitation learning.
In the D-Rock project, MANTIS will be used as a reference system to demonstrate the capabilities of a model-based development approach developed in the project. To demonstrate the effectiveness of this model-based approach the robot will be used to solve a DARPA Robotic Challenge scenario.
Videos
Digital Day 2021: Robotic systems in space - walking robot Mantis and rover SherpaTT

Robotic systems in space - walking robot Mantis and rover SherpaTT.
Wiebke Brinkmann and Tobias Stark, Robotics Innovation Center, live from the Space Exploration Hall, recording from 18.06.2021, 11:30 - 12:00 a.m.
Intelligent space robotics: scientist Wiebke Brinkmann speaks on the EU-funded research in Bremen

PRO-ACT: Multi-Robot Cooperation in Space

Multi-robotics cooperation is one of several key technologies that are seen as promising for planetary exploration. In the PRO-ACT project, these technologies were applied and further developed. The involved robotic systems VELES (a six-wheeled rover from PIAP Space, Poland), Mantis (a six-legged walking robotic system from DFKI, Germany) and the Mobile Gantry (a four-wheeled gantry with a 3d printer from AVS, Spain) were foreseen to perform tasks together. In the last months of the project, the Corona pandemic situation worsened, and as a result, travel restrictions also increased, so that the joint tests with the robotic systems could not be carried out together as planned. The video gives an insight into how the cooperative tasks could still be tested to successfully complete the project.
Other videos show the final tests conducted in more technical detail.
MANTIS: Multi-limbed walking robot for mobile manipulation in unstructured environments

The robot Mantis walking with different gaits and overcoming obstacles as well as performing different manipulation tasks.