In the LIMES project, a highly mobile multi-legged walking robot with the ability to straighten up the upper body in order to use the front extremities as manipulation devices will be developed.
In future extraterrestrial missions, such a system will allow taking soil samples from difficult-to-access regions or assembling and maintaining infrastructure on rough and unstructured surfaces of celestial bodies.
Beside the mechatronic development of the robot, the project focuses on generating and optimizing different locomotion behaviors for traversing varying surface structures and subsoils with the aid of a simulation environment and machine learning methods.
Duration:
01.05.2012
till
30.04.2016
Donee:
German Research Center for Artificial Intelligence GmbH
&
University of Bremen
This project is funded by the Space Agency of the German Aerospace Center with federal funds of the Federal Ministry of Economics and Technology (BMWi) in accordance with the parliamentary resolution of the German Parliament, grant no. 50 RA 1218 (DFKI) und 50 RA 1219 (University of Bremen).
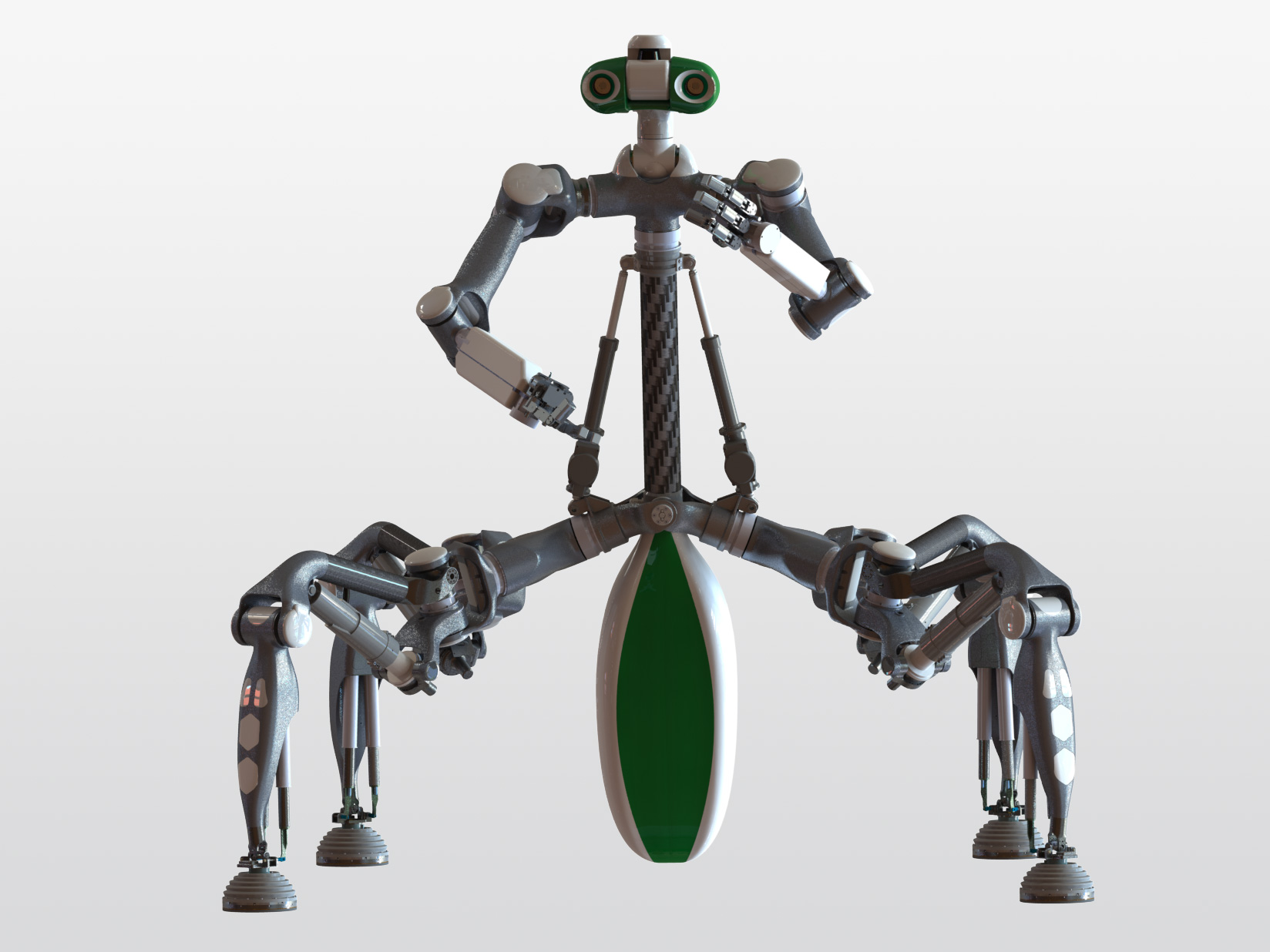
The legged robot Mantis standing in an upright position to exploit its dual-arm manipulation capabilities. (Photo: Marc Manz, DFKI GmbH)
Mantis in a six-legged walking pose for stable locomotion in unstructured environments. (Photo: Marc Manz, DFKI GmbH)
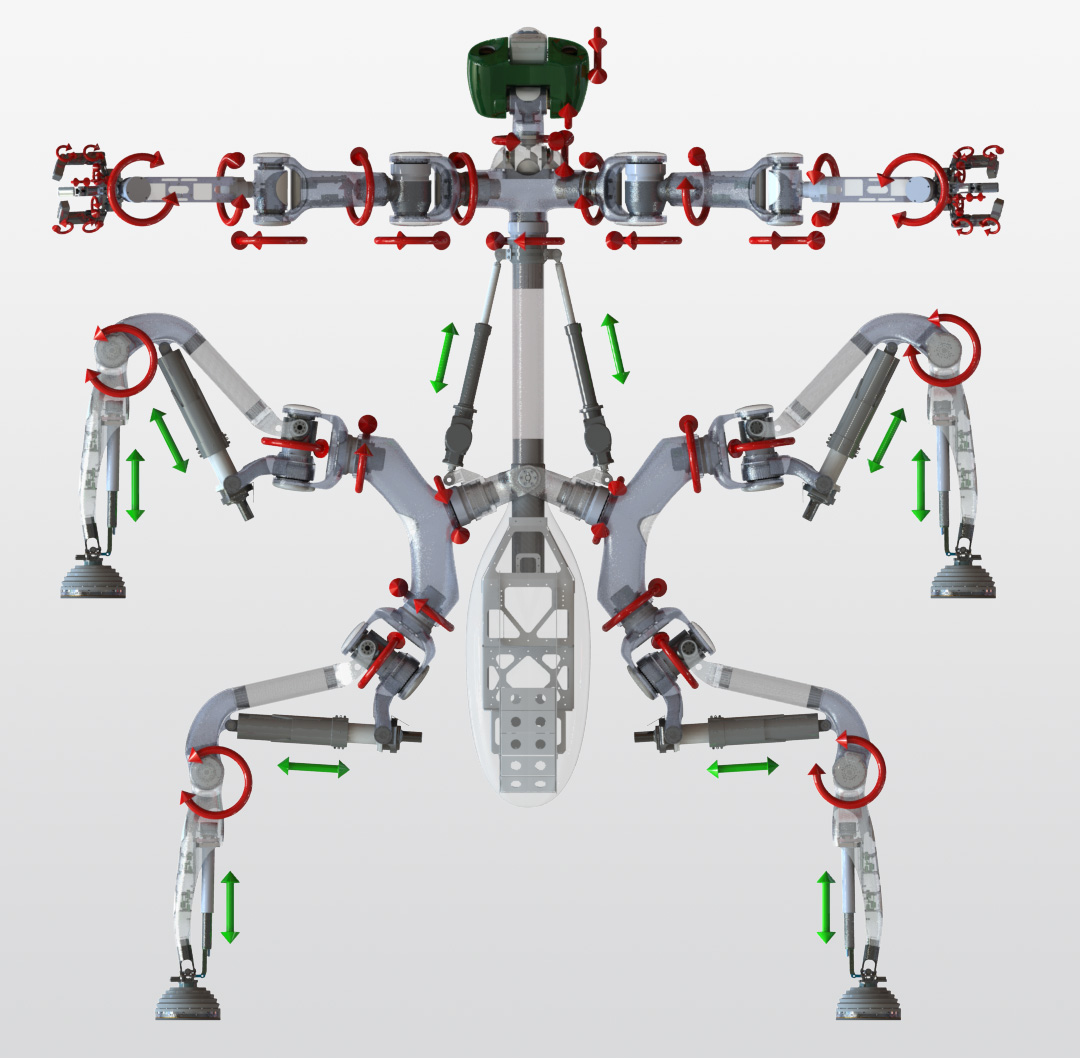
Morphology and degrees of freedom of the robot Mantis. (Photo: Marc Manz, DFKI GmbH)
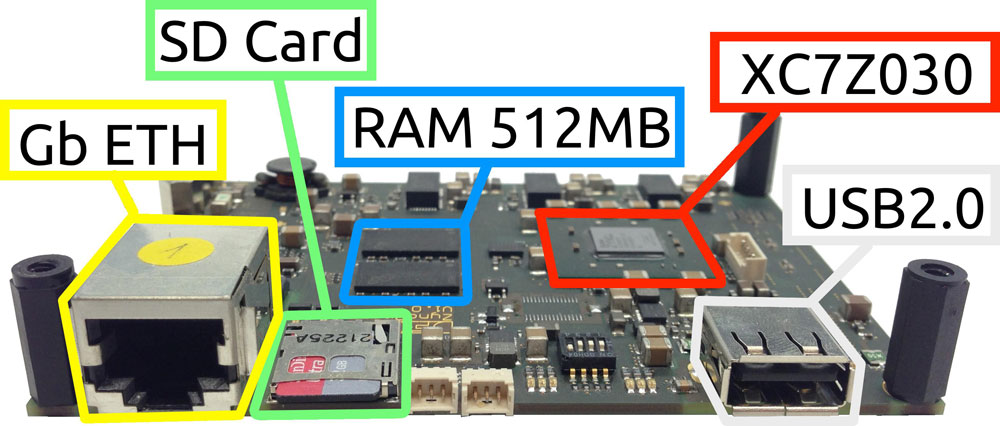
ZynqBrain: Central Control Unit of the robot, which is capable to control the whole locomotor system utilizing an FPGA with dedicated logic to interface with all peripherals. The necessary IP-Cores and associated Linux drivers were generated using the reSPACE Framework. (Source: DFKI GmbH)
Due to their large number of degrees of freedom which are distributed over several extremities, walking robots are able to perform a multitude of different walking patterns and to adapt their posture to the surface structure in order to maneuver securely and efficiently on rough surfaces. In addition, their manifold sensorial equipment makes a visual as well as a tactile perception of their environment possible, thus enabling them to gain information about the conditions of the substrate they are walking on. On the basis of this knowledge, the best locomotion behavior out of a set of previously optimized behaviors for varying situations can be selected. The flexible locomotor system furthermore offers the possibility to use the legs for the manipulation of objects if these are equipped with the appropriate gripping devices. Here, too, a multi-modal sensory infrastructure is essential for coping with these tasks. In the project LIMES a multi-legged robot will be developed which provides the mechatronical capabilities to manage the tasks described above. In parallel to the development of the hardware, precise simulation models for the subsystems of the robot will be developed in order to be able to simulate the behavior of the overall system with high accuracy. Thereon, the virtual system can be utilized to generate and optimize different locomotion behaviors for various terrains with regard to diverse criteria (e.g. energy consumption, speed, etc.) by means of machine learning methods. If the performance of a behavior has reached a high quality it can be transferred to the real system in order to proceed with the optimization. Afterwards, the learned behaviors will be stored in a “behavior library” and can be selected and activated by the system for an optimal locomotion depending on its current situation. In addition, the already learned behaviors can be used as a starting point for further learning procedures to generate new behaviors for other terrains or optimization criteria. Moreover, the simulation allows to analyze the learned locomotion behaviors for the system under low gravity, as on Moon, and to optimize them for such conditions.
Videos
MANTIS: Multi-limbed walking robot for mobile manipulation in unstructured environments
The robot Mantis walking with different gaits and overcoming obstacles as well as performing different manipulation tasks.
LIMES/MANTIS
Animation of Mantis climbing in a crater to maintain infrastructure.
LIMES – Learning Intelligent Motions
Animation of Mantis performing EVA (Extra Vehicular Activity) activities outside a lunar human habitat.
Publications
2021
Experience-Based Behavior Adaptation of Kinematically-Complex Robots
Alexander Dettmann
In n.n., Feb/2021. Universität Bremen.
2020
Phobos: A tool for creating complex robot models
Kai von Szadkowski, Simon Reichel
In Journal of Open Source Software, The Open Journal, Journal of Open Source Software, volume 5, number 45, pages 1326, Jan/2020.
BOLeRo: Behavior Optimization and Learning for Robots
Alexander Fabisch, Malte Langosz, Frank Kirchner
In International Journal of Advanced Robotic Systems, SAGE Publications, volume 17, number 3, pages n.n.-n.n., 2020.
2016
Development and Control of the Multi-Legged Robot Mantis
Sebastian Bartsch, Marc Manz, Peter Kampmann, Alexander Dettmann, Hendrik Hanff, Malte Langosz, Kai von Szadkowski, Jens Hilljegerdes, Marc Simnofske, Philipp Kloss, Manuel Meder, Frank Kirchner
In Proceedings of ISR 2016: 47st International Symposium on Robotics, (ISR-2016), 21.6.-22.6.2016, München, VDE VERLAG GmbH, pages 379-386, Jun/2016. ISBN: 978-3-8007-4231-8.
2015
Experience-Based Adaptation of Locomotion Behaviors for Kinematically Complex Robots in Unstructured Terrain
Alexander Dettmann, Anna Born, Sebastian Bartsch, Frank Kirchner
series DFKI Documents, volume 15-03, Sep/2015. DFKI GmbH, Universität Bremen.
An Experience-Based Interface for Abstracting the Motion Control of Kinematically Complex Robots
Alexander Dettmann, Sebastian Bartsch, Frank Kirchner
series DFKI Documents, volume 15-03, Sep/2015. DFKI GmbH, Universität Bremen.
Phobos: 3D Robot Modelling made easy
Kai von Szadkowski, Malte Langosz
In Proceedings of the RIC Project Day Workgroups Locomotion&Simulation, 17.9.-17.9.2015, Bremen, Selbstverlag, series DFKI Documents, volume 14_06, number 1406, Sep/2015. Robotivs Innovation Center Bremen. DFKI.
Phobos: A Blender Plugin for Creating Robot Simulation Models
Kai von Szadkowski, Malte Langosz
In Proceedings of the RIC Project Day Workgroups Locomotion&Simulation, 17.9.-17.9.2015, Bremen, Selbstverlag, series DFKI Documents, volume 14_06, number 1406, Sep/2015. Robotics Innovation Center Bremen. DFKI.
Experience-Based Adaptation of Locomotion Behaviors for Kinematically Complex Robots in Unstructured Terrain
Alexander Dettmann, Anna Born, Sebastian Bartsch, Frank Kirchner
In In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2015), (IROS-2015), 28.9.-01.10.2015, Hamburg, IEEE, pages 4504-4511, 2015. IEEE.
An Experience-Based Interface for Abstracting the Motion Control of Kinematically Complex Robots
Alexander Dettmann, Sebastian Bartsch, Frank Kirchner
In Proceedings of ASTRA 2015, (ASTRA-2015), 11.5.-13.5.2015, Noordwijk, ASTRA, 2015.
Equipping industrial deep-sea manipulators with a sense of touch
Peter Kampmann, Timo Stoffregen, Frank Kirchner
In Proceedings of the Oceans'15 MTS/IEEE Washington Conference & Exhibition, At Washington D.C., (OCEANS-15), 19.10.-22.10.2015, Washington D.C., MTS/IEEE, 2015.
2014
Introducing Particle Swarm Optimization Into a Genetic Algorithm to Evolve Robot Controllers
Malte Langosz, Kai von Szadkowski, Frank Kirchner
In Proceedings of Genetic and Evolutionary Computation Conference, (GECCO-2014), 12.7.-16.7.2014, Vancouver, o.A., Jul/2014.
How to use the Bus Pirate as a logic analyzer
Hendrik Hanff
In Proceedings of the RIC Project Day Workgroups ‘Electronic Design’ and ‘Mechatronic Design’, 24.7.-24.7.2014, Bremen, Selbstverlag, series DFKI Documents, volume 14-05, Jul/2014. DFKI Robotics Innovation Center Bremen. DFKI GmbH. ISBN: ISSN 0946-0098.
Towards Lifelong Learning of Optimal Control for Kinematically Complex Robots
Alexander Dettmann, Malte Langosz, Kai von Szadkowski, Sebastian Bartsch
In ICRA14 Workshop on Modelling, Estimation, Perception and Control of All Terrain Mobile Robots, (ICRA-2014), 31.5.-07.6.2014, Hong Kong, IEEE, Jun/2014.
Integration of Fiber-Optic Sensor Arrays into a Multi-Modal Tactile Sensor Processing System for Robotic End-Effectors
Peter Kampmann, Frank Kirchner
In Sensors - Open Access Journal, MDPI - Open Access Publishing, volume 14 - Special Issue Tactile Sensors and Sensing Systems, number 4, pages 6854-6876, Apr/2014.
Extension of a plan-based component manager for real time adaptation
Matthias Goldhoorn, Sylvain Joyeux
In ISR/Robotik 2014; 41st International Symposium on Robotics; Proceedings of, (ISR-14), 02.6.-03.6.2014, Munich, VDE, pages 1-6, 2014. VDE. ISBN: 978-3-8007-3601-0.
2013
Spaceclimber: A Six-Legged Robot For Extraterrestrial Surface Exploration In Unstructured And Steep Terrain
Sebastian Bartsch, Frank Kirchner
In Proceedings of the Seventh International Workshop on Robotics for Risky Environment - Extreme Robotics, (IARP RISE-ER-2013), 01.10.-03.10.2013, St. Petersburg, o.A., Oct/2013.
A Behavior-based Library for Locomotion Control of Kinematically Complex Robots
Malte Langosz, Sebastian Bartsch, Alexander Dettmann, Frank Kirchner, Lorenz Quack
In Proceedings of the 16th International Conference on Climbing and Walking Robots, (CLAWAR-2013), 14.7.-17.7.2013, Sydney, NSW, o.A., Jul/2013.
MANTIS - A Robot With Advanced Locomotion And Manipulation Abilities
Marc Manz, Sebastian Bartsch, Frank Kirchner
In Proceedings of the 12th Symposium on Advanced Space Technologies in Robotics and Automation, (ASTRA-2013), 15.5.-17.5.2013, Noordwijk, o.A., May/2013.