Teams of the Robotics Innovation Center
Under the long-term goal of "Long Term Autonomy", the Robotics Innovation Center (RIC) at the German Research Center for Artificial Intelligence is addressing the question of how intelligent behavior of technical systems in complex and dynamic environments can be realized sustainably over long periods of time, months and years.
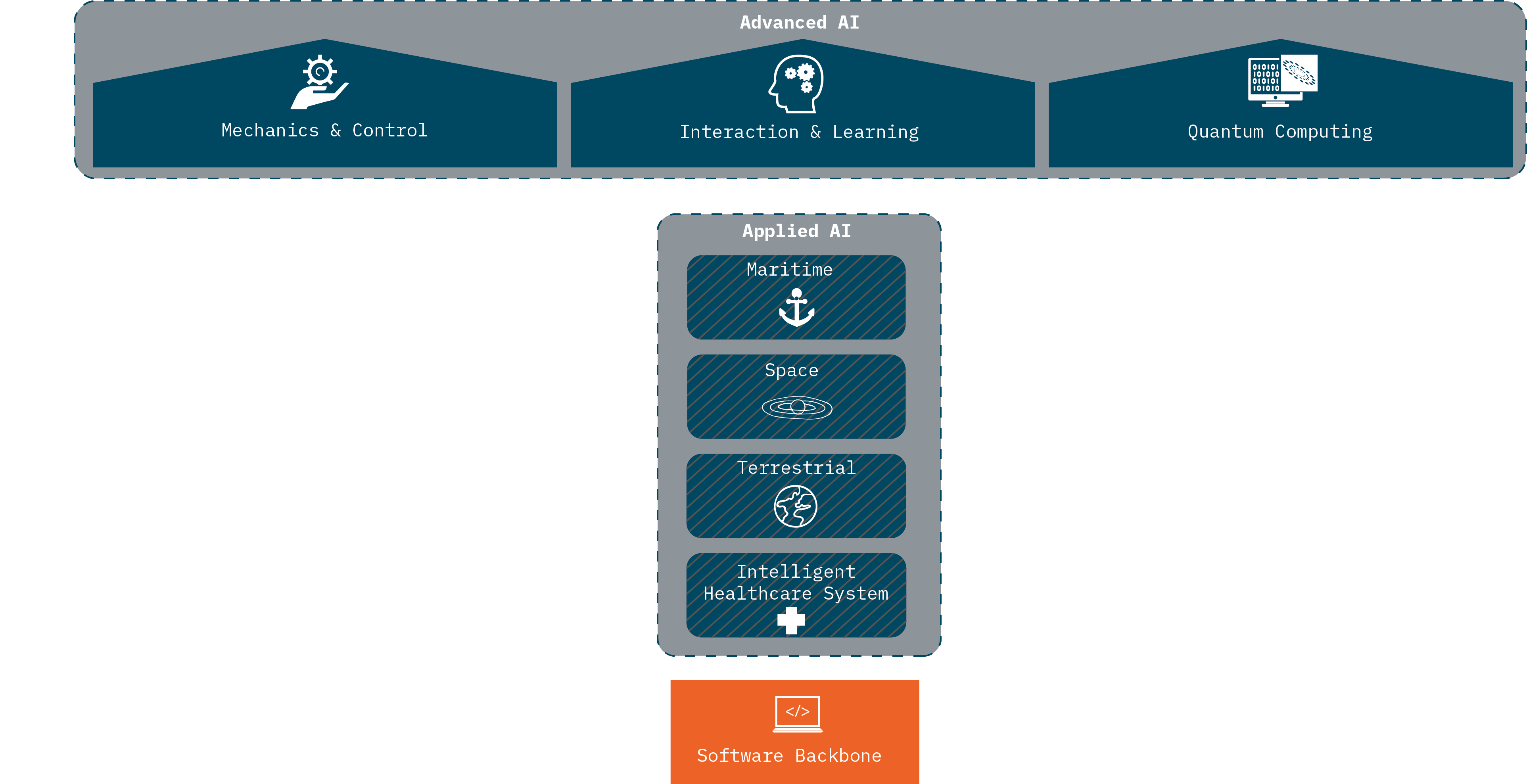
Within the research department, this vision is pursued in four fundamentally oriented research teams (Advanced AI): "Mechanics & Control", "Quantum Computing" and "Interaction & Learning", which aim to crucially advance robotics research by new scientific findings.
Four application-oriented teams (Applied AI) "Maritime", "Space", "Terrestrial" and "Intelligent HealthCare Systems" use the gained understanding and transfer it into concrete areas of application. They are supported by the backbone team "Software", which is responsible for the development, deployment and quality assurance of required software components.