iStruct
Intelligent Structures for Mobile Robots

The aim of the project iStruct is to develop a robotic system as well as biologically inspired structural components which, if applied on the robotic system, effectively improve the locomotion and mobility characteristics. In order to achieve this goal, an improved perception of the environment and the own condition is needed. The structures designed and build are as self-contained as possible with regard to sensing, sensor preprocessing, control and communication. The biologically inspired robot itself is an ideal test platform for the foot and spine structures. These structures can extend the already existing locomotion behaviors of a robot and are used contemporaneous as carrier and sensor system. This way, different functionalities are united in one construction unit.
| Duration: | 15.05.2010 till 15.08.2013 |
| Donee: | German Research Center for Artificial Intelligence GmbH & University of Bremen |
| Sponsor: |
Federal Ministry of Economics and Technology
German Aerospace Center e.V. |
| Grant number: | This project is funded by the Space Agency of the German Aerospace Center with federal funds of the Federal Ministry of Economics and Technology (BMWi) in accordance with the parliamentary resolution of the German Parliament, grant no. 50RA1013 (DFKI) and 50RA1014 (University of Bremen). |
| Partner: | University of Bremen |
| Application Field: | Space Robotics |
| Related Projects: |
SpaceClimber
A Semi-Autonomous Free-Climbing Robot for the Exploration of Crater Walls and Bottoms
(07.2007-
11.2010)
LittleApe
(07.2008-
12.2009)
|
| Related Software: |
NDLCom
Node Level Data Link Communication
|


Project details


The focus of this project lies on the design of a robot demonstrator and the development of intelligent structures for application in mobile robot systems, especially in walking machines. Project goal is to increase the efficiency of a complex walking robot by using intelligent structures. In order to achieve this goal, rigid or connecting elements are extended to single subsystems. These subsystems provide an advantage to the overall system in which they are used by delivering enhanced mobility and sensor information. For testing and evaluation of the intelligent structures, a suitable robot demonstrator will be developed.
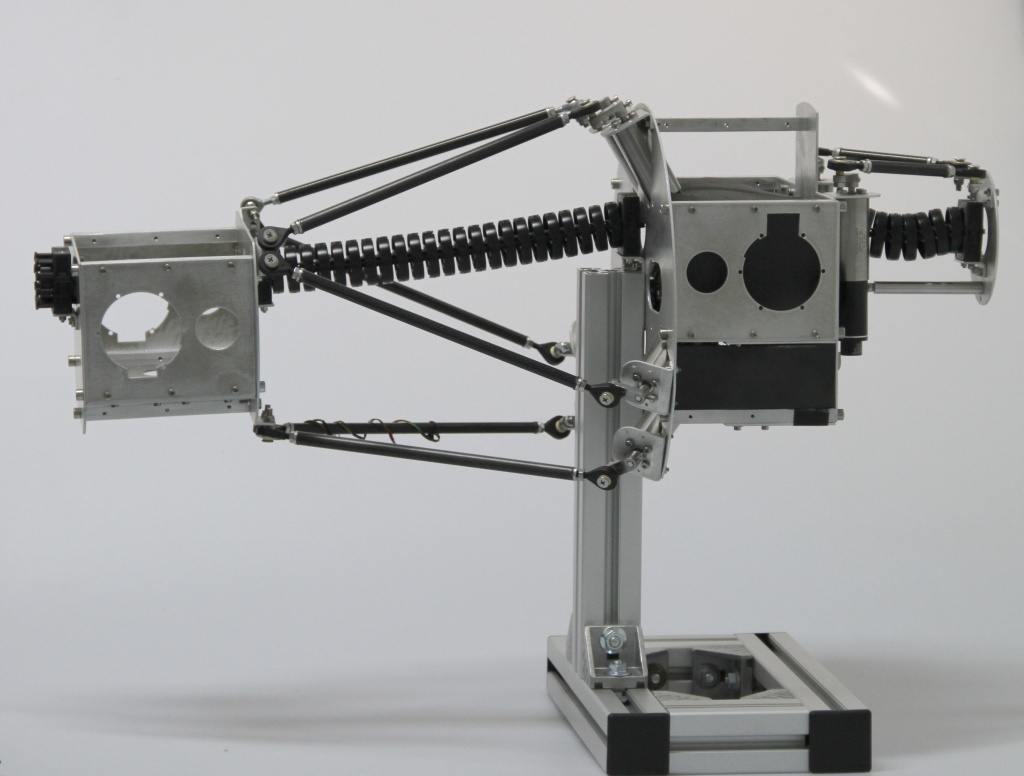
To increase the mobility towards a so-called multi-locomotion system (i.e. providing the means to walk quadrupedally or bipedally), the rigid connection between the front and rear body will be replaced by an actuated spinal column (see Figure 1). This active artificial spine effectively improves the locomotion and mobility capabilities when applied to a mobile robotic system.
The natural spinal column is not an independent functional unit, but must be considered as subcomponent of a more complex biomechanical system consisting of a variety of muscles, bones and tendons. To replicate this functionality a parallel kinematic is used. A parallel kinematic has excellent properties for body structures of mobile robots, as in some motions sequences like fast walking, high inertial forces appear and a stiff structure is beneficial. Furthermore, the load in such a structure is shared and multiple actuators are involved in generating motions. Each of the six drive chain of the torso section is actuated by a brushless DC motor (BLDC) with a high reduction ratio gear (Figure 2). To determine the motor states, optical incremental encoders and absolute magnetic encoders are added to the mounting.
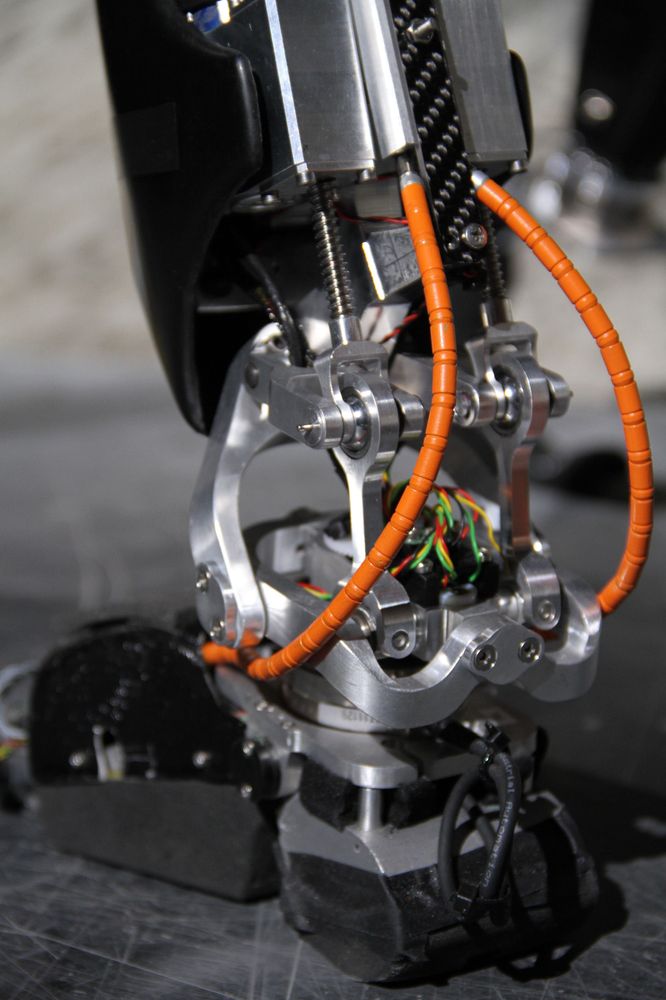
Another step towards allowing bipedal walking is the development of more advanced hind feet (Figure 3). Most multi-legged robots are equipped with single-point-contact feet for the sake of simplicity in design and control. Still, multi-point-contact feet (MPCF) can improve traction control in quadrupedal walking and allow bipedal walking. To make use of these advantages the lower legs of the robotic system were developed and integrated with an actuated ankle joint, an attached MPCF-structure and a set of sensors with their required electronics. The lower leg structure is actively and passively adaptable with three passive DOF near the ankle, two active DOF in the ankle and two active DOF in the toe joints. To control this high level of adaptability the feet have a very high sensor density including among others a 6-axis force/torque sensor, a pressure sensor array of 43 FSR-sensors, a digital 3-axis accelerometer and digital magnetic angular encoders to monitor every moving axes of the foot and ankle structure. A custom circuit board was developed to process the sensor data locally and to limit data traffic on the robot. Thus the foot including its electronics provides a self-contained unit.
Videos
iStruct: Stand-up motion

The robot Charlie shows a transition from a four-legged posture into a two-legged posture. While standing on two legs, the range of motion of the artificial spine is demonstrated.
iStruct: Walking

The video shows the walking pattern of the iStruct Demonstrator. Besides different walking directions a smooth transition between the respective directions is realized.
iStruct: Balancing

The robot shifts its center of mass in realtime, based on the slope it is walking on.