µAUV²

Technical Details
| Size: | 27 x 7 x 7 cm |
| Weight: | 1.2 Kg |
| Power supply: |
Lithium Polymer Battery, 11.2V 4000mAH
|
| Actuation/ Engine: |
3x Maxon RE 10 DC Motors (1.5W, 6V) for propulsion. Maxon Amax 16 DC Motor 6V
|
| Sensors: |
in-house developed µIMU consisting of: 3x gyroscopes, 3x accelerometers, 3x magnetometer, pressure sensor, encoder-modules for the egines
|
| Communication: |
optical communication via "optical IrDA": IrDA protocol layer using visible light for transmission
|
| etc.: |
all thrusters rotatable by 180° enable movements in four degrees of freedom, System on Chip Structure using a Virtex4 FPGA from the LX series, Blackfin DSP, micropump for buoyancy compensation (46.5 µl/s)
|
Organisational Details |
|
| Application Field: | Underwater Robotics |
| This system is not actively used anymore. | |
System description
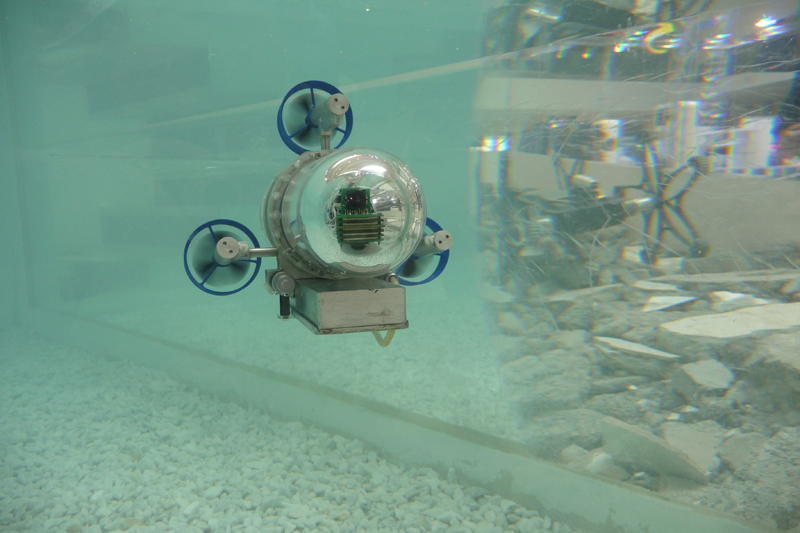
The MicroAUV2 is the result of further development of the MicroAUV. Besides the advanced propulsion system, the MicroAUV2 is able to compensate buoyancy. Together with the huge amount of sensors, this platform is used for the evaluation of marine control strategies in combination with behavior-based control approaches from artificial intelligence.
Currently, several students activites are in progress concerning the enhancement of the autonomy of the MicroAUV2 in terms of energy supply, communication, and adaptive self-learning control strategies.
With the incorporation of a camera system together with the use of the digital signal processor and the FPGA, the MicroAUV2 can be used for evaluating underwater vision algorithms.
Videos
µAUV²: First underwater tests
In this video you can see the first swimming tests of the µAUV².