SpiderCam
SpiderCam Cable Robot

Contact person:
Technical Details
| Weight: | up to 150 kg Load |
| Power supply: |
4 x 32 A, 400 V
|
| Speed: | max: 2000 mm/s |
| Sensors: |
8 absolute encoders
|
| Manufacturer: |
Spidercam GmbH
|
| max. acceleration: |
1529 mm/s²
|
| Position Accuracy: |
< 5 mm
|
| Degrees of freedom: |
3 (horizontal and vertical movements)
|
| Working area: |
approx. 16m x 7m x 6m (l x w x h)
|
Organisational Details |
|
| Application Field: | Space Robotics |
| Related Projects: |
Inveritas
Innovatice technologies for relative navigation and capture
(05.2009- 03.2012)
|
| This system is not actively used anymore. | |
System description
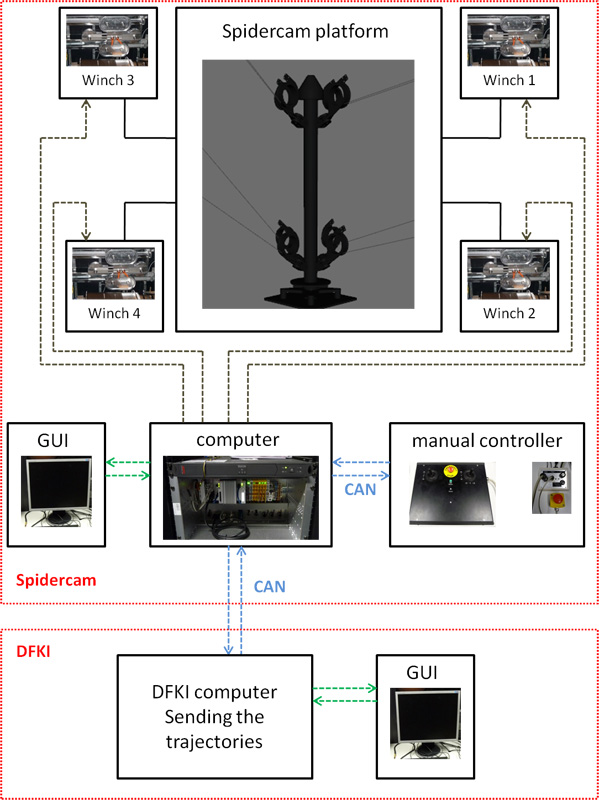
The SpiderCam is a cable robot, which consists of a mount, 8 cables connected to 4 winches, and a controller. The winches cause the mount to fly through the Exploration Hall by increasing and decreasing the cable lengths. The mount is supplied with power and data transmission by cords inside the cables. The SC is controlled via CAN-Bus. It needs position changes as control input and delivers absolute positions based on the internal cable length measurement. The SC can load 150 kg of equipment. It is used in the project INVERITAS to simulate a service satellite.
Videos
Inveritas: Relative navigation and capture
Prototypic realization of a Rendez-Vous and Capture (RvC) system