SherpaTT

Technical Details


System description

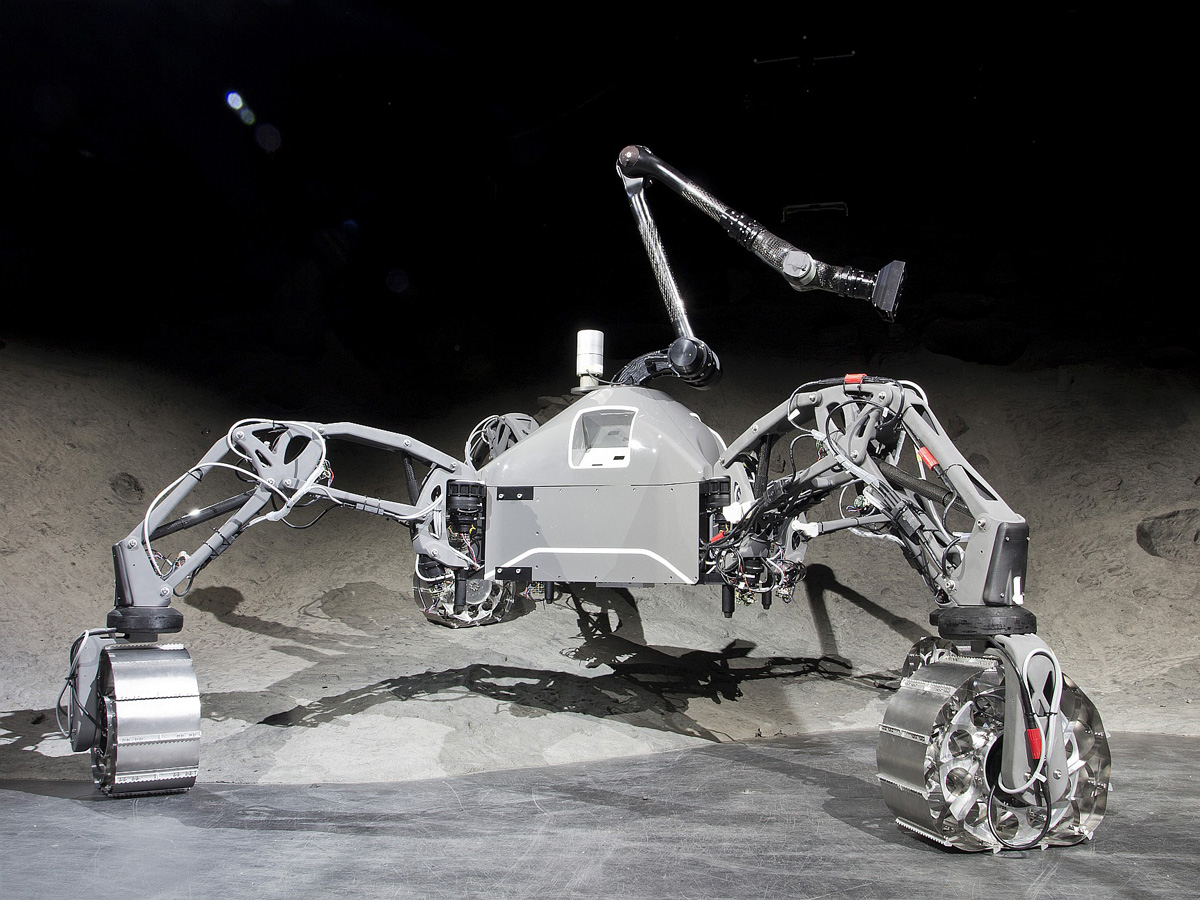

SherpaTT is a hybrid walking and driving rover with an active suspension system developed for high mobility in irregular terrain. The internal power supply (2x 10,000m Ah@44.4 V), a lidar sensor, a camera and the manipulator arm allow the cinduction of autonomous exploration activities. The rover is equipped with six standardized electro-mechanical interfaces, one of them being the manipulators hand interface. Due to the electro-mechanical itnerfaces, the robot can be equipped and reconfigured with modular payload items to match the current task. One example being the usage of modular sampling devices, that can be sealed and handed over to the robotic team mate Coyote III. SherpaTT’s overall weight is about 150 kg. Due to self-locking gears in the four suspension units, the rover is able to cope with high additional payload weights without increasing energy consumption to maintain the current robot’s body pose.
SherpaTT is developed within the scope of the project TransTerrA which aims to implement a logistics chain, based on a heterogeneous team of mobile and stationary robotic devices. SherpaTT has the role of an exploration and sample collecting rover in the heterogeneous robotic team. Collected samples are handed over to the Shuttle rover (Coyote III) for transport to the landing site and eventually sample return to earth.
SherpaTT represents an enhanced design of the Sherpa rover, which was originally developed within the RIMRES project. The design considerations and development concept of SherpaTT is derived from the lessons learned of Sherpa. By introducing a knee joint within the suspension units (“legs” of the system, a three dimensional workspace is created. Furthermore two of the joints in the original design were used very rarely. Hence, a reduction from six degrees of freedom (DoF) in the original design to five DoF in the new design along with a significant increase of the workspace of each suspension unit was possible.
Besides the primary scenario with respect to extraterrestrial exploration, SherpaTT demonstrates its application to terrestrial scenarios as well, such as search and rescue and /or security. The water proof design of the suspension units allows to exchange the central body of the robot to create SherpaUW which is aspired to be applied in deep sea exploration scenarios.
Videos
CoRob-X: DFKI tests lava cave exploration by autonomous robot teams for future lunar missions
Lava caves on Mars and particularly on the moon are not only interesting for exo-geologists and other space scientists, but they also could be used as storage rooms or even habitats for future human settlements. The question is how to access and explore these huge cavities under the lunar surface without risking the lives of astronauts.
This is where robots, or rather teams of robots, come into play. In the future, several cooperating robots could explore the surface above a lava tube and even enter and explore the cave from the inside. In CoRob-X, we demonstrated in a Lunar Analogue Mission on Lanzarote how this could work. With the joint effort of researchers from five European member states and funding from the European Commissions’ H2020 Programme, we had developed a robotic exploration team of three autonomous robots. In January/February 2023, the CoRob-X robot team was able to successfully complete all four phases of a lunar lava tube exploration mission. But see for yourselves…
SherpaTT: Rover testing in snow covered field
Bremen was covered in snow beginning to mid of February. The team working with SherpaTT used this rare occurence to conduct some experiments with the rover in the snow. In the tests the rover drove several 10m tracks through untouched snow in order to measure the feedback of internal sensors (forces, vibrations, currents) in this environment. The experiments reveal how SherpaTT "feels" the snow.
Digital Day 2021: Robotic systems in space - walking robot Mantis and rover SherpaTT
Robotic systems in space - walking robot Mantis and rover SherpaTT.
Wiebke Brinkmann and Tobias Stark, Robotics Innovation Center, live from the Space Exploration Hall, recording from 18.06.2021, 11:30 - 12:00 a.m.
ADE: Final field testing in Wulsbüttel with DFKI rover SherpaTT
As part of the ADE space project funded by the EU and coordinated by GMV Aerospace and Defence, the rover SherpaTT of the DFKI Robotics Innovation Center had to traverse a long distance autonomously while reacting to unexpected incidences. Originally planned to take place on Fuerteventura, the tests had to be moved to the sand well near Wulsbüttel due to the pandemic. Almost like Spain, but slightly different weather conditions.
ADE(OG10): Autonomous Space Robotics Navigation Tests with rover SherpaTT at Galopprennbahn Bremen
SherpaUW: Tests with hybrid underwater rover in the maritime exploration hall
Field Trials Morocco: EU partner test new software with DFKI rover SherpaTT
The objective of the Strategic Research Cluster (SRC) on Space Robotics Technologies funded by the European Union is to enable major advances in space robotic technologies. Among others, these technologies are needed for future robotic missions to explore the surfaces of Mars, Moon and other celestial bodies. At the first stage of the SRC implementation (2016–2019), several research & development projects ("operational grants") established core technologies for space robotic systems. Since lab environments cannot adequately simulate the harsh environmental conditions a space exploration robot will be confronted with, field tests in terrestrial Mars or Moon analogues are imperative.
Field Trials Utah: Robot team simulates Mars mission in Utah
A barren, rocky desert landscape and not a single soul around – to come as close as possible to the inhospitable conditions on the Red Planet, scientists of the Robotics Innovation Center of the German Research Center for Artificial Intelligence (DFKI) tested the cooperation of various robot systems in the desert of the American state of Utah from 24 October to 18 November 2016.
SherpaTT: Driving in natural Mars analogue terrain in the desert of Utah, US
SherpaTT driving in natural Mars analogue terrain in the desert of Utah, USA and demonstrating its ability to keep its body level during drives through rough terrain.
SherpaTT during outdoor runs
SherpaTT demonstrating its ability to keep ist body level during drives through rough terrain.