SeeGrip Manipulator
SeeGrip Manipulation System

Technical Details
| Size: | 450 x 120 x 120 mm total (165 x 20 x 30 mm finger Module) |
| Weight: | 9,5 kg |
| Power supply: |
12 V DC, 2 A nomial, 7 A peak
|
| Actuation/ Engine: |
Hydraulic / Electric
|
| Sensors: |
3x 6-Axis-Force-Torque Sensor
6x Piezoelctric Sensorarrays consisting of 20 Sensor elements each (custom design)
6x Fiber optic Sensorarrays consisting of 324 sensor elements each /custom design)
6x Absolute angular encoders with 12 Bit resolution
1x Inertial measurement unit
1x relative pressure sensors for the hydraulic circuit
3x absolute pressure sensors for hydraulic circuit and measuring the ambient pressure conditions
26x temperature sensors for measuring the ambient conditions and the system state
1x humidity sensor
|
| Degrees of Freedom: |
7
|
| Maximum fingertip force: |
20 N
|
Organisational Details |
|
| Application Field: | Underwater Robotics |
| Related Projects: |
SeeGrip
Autonomous underwater gripper with tactile feedback for form- and force closed object manipulation.
(09.2009- 03.2013)
Mare-IT
Information Technology for Maritime Applications
(08.2018- 11.2021)
|
| This system is not actively used anymore. | |
System description


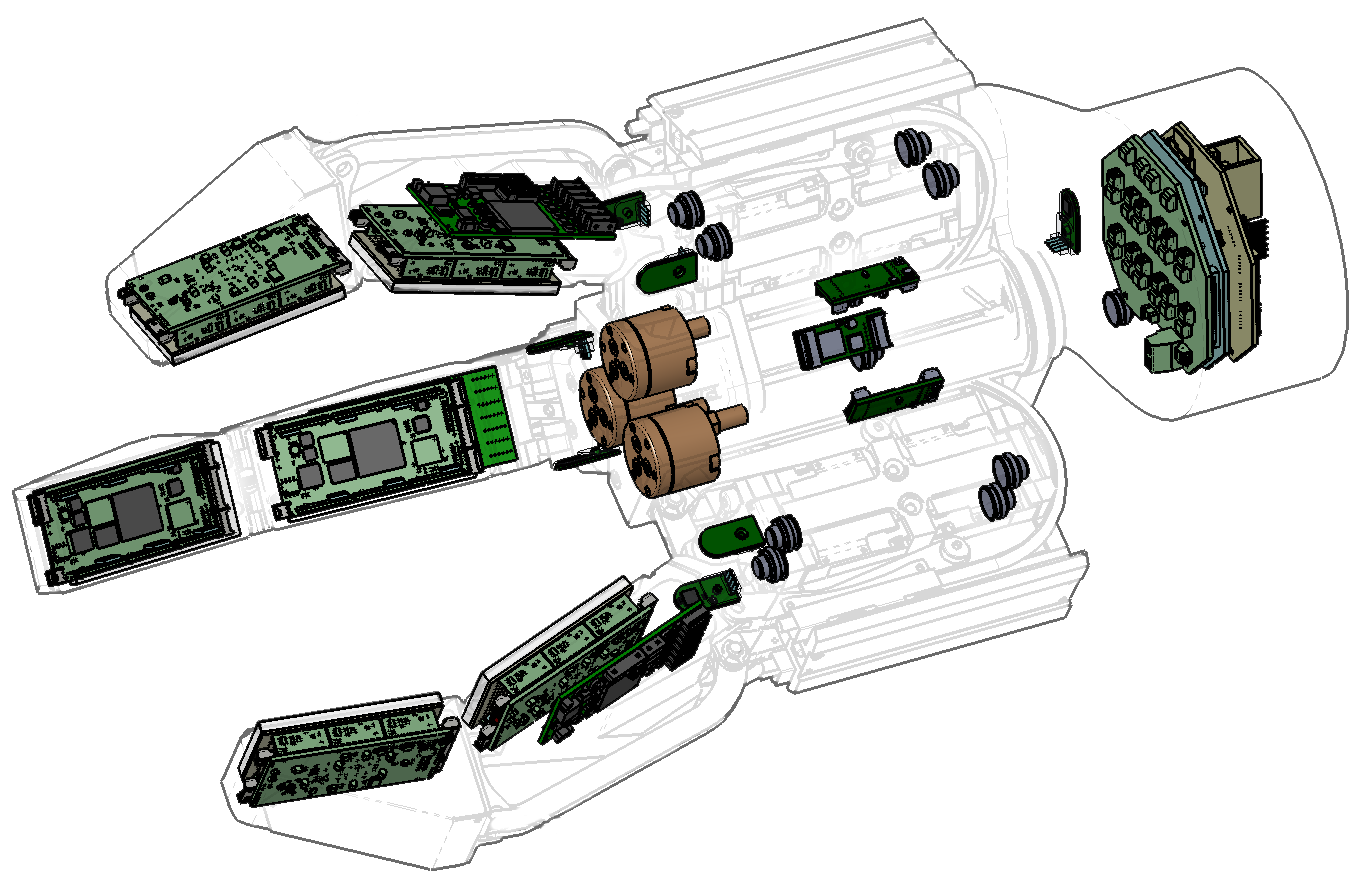
The SeeGrip manipulation system is a three-fingered manipulator with seven degrees of freedom. The system is designed to be working in deep-sea, at depths of up to 6000 m. A variety of tactile sensors of different modality equip this gripper with a sense of touch, which is one of the specialities of this gripper.
Under disturbed viewing conditions like in turbid water due to water-currents or induced by thrusters of deepsea vehicles, manipulation systems cannot operate. The SeeGrip manipulator enables the performance of object handling tasks by exploring the near surroundings of the working area by touch.
In order to gain information about the environment by touch, as much information as possible are to be collected. This is why the gripper system is – similar to the humand hand– equipped with different modalities to sense touch. Dynamic force sensors allow the identification of surface properties or detect slippage. Static force sensors measure the object geometry, the weight distribution and the absolute incoming forces.
Additional sensors like temperature sensors, position sensors and pressure sensors monitor the system state of the gripper. Furthermore, these sensor values can be combined with the force sensor values inorder to increase the knowledge about an object contact.
Alltogether, there are 2139 sensors integrated in the gripper, 2082 of those are responsible for measuring contact forces.



