AVALON
Autonomous Vehicle for Aquatic Learning, Operation and Navigation

Technical Details
| Size: | 24,6cm Diameter, 1,35m Length |
| Weight: | 132 lbs |
| Power supply: |
26,4V 40Ah (8x LiFe 3,3V) Approx 10h operation time
|
| Actuation/ Engine: |
5 x SeaBotix BTD150, 1 x Self build (120W)
|
| Sensors: |
1 x Prosilica GC650C (directed forward),
1 x Prosilica GC2450C (directed downwards),
2 x The Imaging Source DFK 72BUC02 USB CMOS Color (Stereo-camera-System: can be directed upwards or downwards),
1 x Sensortechnics CTE8016GY7,
2 x Tritech Micron DST Scanning Sonar,
1 x Xsens MTi inertial measurement unit,
1 x FOG (Fibre Optic Gyro): KVH DSP-3000,
2 x Internal temperature sensor,
2 x Internal pressure sensors,
1 x Battery monitoring system,
1 x Green line laser,
1 x Tritech Echo Sounder,
6 x Electricity monitoring of all engines,
6 x Sensor for detection of any water inrush
|
| etc.: |
1 x Tritech MicroNav Modem, 9 x High-Power LEDs for Status Indication and Illumination, 1 x Operator Controll Unit (OCU) for a direct and PC independent control
|
Organisational Details |
|
| Application Field: | Underwater Robotics |
| Related Projects: |
CUSLAM
Localization and mapping in confined underwater environments
(09.2009- 07.2012)
IOP
Inspection of offshore pipelines
(12.2010- 07.2011)
FlatFish
Autonomous underwater vehicle
(11.2013- 06.2017)
|
| This system is not actively used anymore. | |
System description
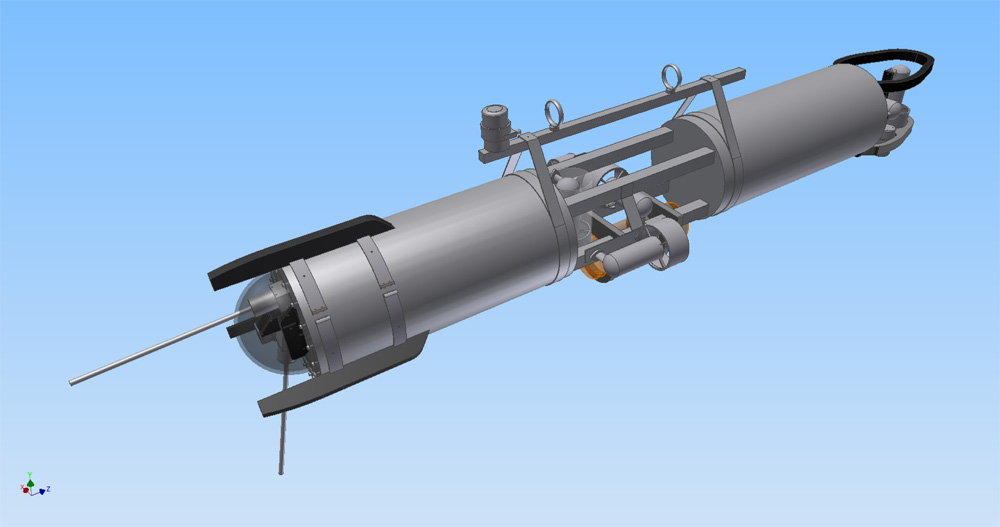

The AUV "Avalon" (Autonomous Vehicle for Aquatic Learning, Operation and Navigation) measures 1.35 meters in length and 24.6 centimeters in diameter. Because of its compact construction Avalon is perfectly suited Imagefor operations in narrow obstacle-rich waters while being robust against currents and turbulences due to a weight of about 60 kilograms. Its 6 SeaBotix thrusters provide excellent maneuverability making the most delicate tasks possible while mutually being able to reach a maximum depth of 150 meters. The maximum speed is at about 2 meters per second. Two 800 Lumen LED flashlights enable Avalon to operate better in dark areas.
The computer hardware is divided into two PCs, each located in one of the two cylindric compartments. One is an Intel P9700 low power Dual Core 2.8 GHz with 4 GB RAM, 64GB and 500GB HDD. The main task is image processing. The other PC is a Mini-ITX System with Intel Core i7-640M CPU. Its main tasks are control tasks, sensor interfaces, communication and the rest of the high level algorithms.
In order to perceive the environment Avalon is equipped with different sensors. In total there are 4 cameras: On the front is one Prosilica GC650C with 659 x 493 px resolution (manufacturer's specification, like the following) and 90 FPS tops. Another Prosilica camera (GC2450C) with 2448 x 2050 px is directed to the ground. The other two cameras are a gift of The Imaging Source and are used as a stereo camera system. It can be directed either up or down. Both cameras are of type DFK 72BUC02 with a resolution of 2592x1944 px and 52 FPS.
Avalon is also equipped with two Tritech Micron DST scanning sonar devices. They are installed on top and at the back of the vehicle. The first one scanning horizontally and the second one vertically. They provide sequential 2D all around scans.
For the spacial orientation and navigation Avalon uses three further sensors: To obtain depth samples it is equipped with a pressure meter (Sensortechnics CTE8016GY7). It measures the pressure above the vehicle in a 16Hz frequency. The maximal deviation is 0.5cm. For pose estimation we use an IMU (Inertial Measurement Unit) and and FOG (or iFOG - Intelligent Fibre Optic Gyroscope). The IMU has been self developed by DFKI and consists of 3 accelerometers, two gyroscopes and 3 magnetometers. It measures translatory and rotatory acceleration forces and provides in normal mode the spacial orientation of the vehicle. To obtain more accurate values these results are fused with those of the FOG. The used FOG is the 1D version made by Tritech. It provides very precise rotation information (5 rotations in one level).
Avalon is also equipped with a green laser which can project a horizontal line to be captured with the front camera. Therefore the orientation of the laser line is maintained by a servo motor (Robotis Dynamixel DX112) In a suitable environment, Avalon is able to use this information to compute the distance to certain obstacles.
The last sensor is a Tritech MicroNav acoustic underwater modem. It is being used to send start and stop signals to Avalon. This is very useful to abort the autonomous drive mode manually because WiFi does not perform well under water. Anyway, Avalon is equipped with WiFi connection as well to control it manually while it is on the surface.
Videos
AVALON: Autonomous mission
The Robotsystem AVALON on an autonomous mission. Several tasks are performed without external communication.
AVALON: Video-Diary
AVALON during SAUC-E 2011, the mechanical redesign of the rear area and a demonstration of autonomous capabilities.
AVALON: Laser scanner and autonomous depth control
Sample images with the laser scanner as well as autonomous depth control.
AVALON: Overview and movement abilities
Presentation of the AUV and his abilities.