ARTEMIS
DLR SpaceBot Cup 2013 Rover

Technical Details

System description

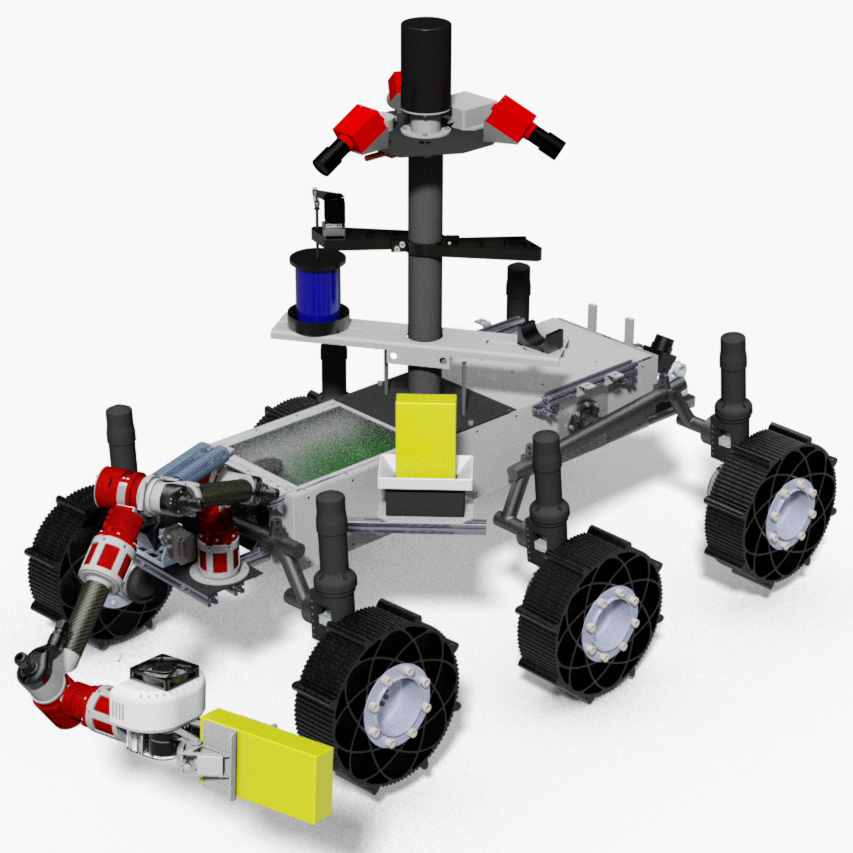
Due to the requirements of the competition the rover is equipped with powerful sensors and a manipulator arm. It is highly mobile by using a triple bogie suspension and rubber tweels.
Videos
ARTEMIS: First test run with a penetrometer
The rover Artemis, developed at the DFKI Robotics Innovation Center, has been equipped with a penetrometer that measures the soil's penetration resistance to obtain precise information about soil strength. Such measurements allow for conclusions about the current soil condition, applicable in both agricultural settings and space exploration. The video showcases an initial test run with the device mounted on the robot. During this test, the robot was remotely controlled, and the maximum penetration depth was limited to 15 mm.
ARTEMIS: At the THW test site in Hoya
SpaceBOT Camp 2015
Fully autonomous run of the ARTEMIS rover at the SpaceBot Camp 2015
ARTEMIS Rover: Overview
Overview of the competition run of team ARTEMIS.
ARTEMIS Rover: Mobility
Mobility of the ARTEMIS rover.
HySociaTea: Selected features from the final project demonstration
This video shows selected technologies of the HySociaTea scenario: the any-time resource planner, the object recognition using the information from the eye tracker, speech interaction with the robots and the virtual character, autonomous task allocation of the robots and autonomous robot-robot interaction.
HySociaTea: Autonomous robot-robot collaboration of Compi and AILA
This video shows the autonomous robot-robot collaboration in HySociaTea using the TECS framework. The Compi robot takes item to be delivered and reports that a delivery is required. AILA recognizes that she can handle the task and takes over. The handover is realized using a communication protocol.