PRO-ACT (OG11)
Planetary RObots Deployed for Assembly and Construction Tasks
")
The primary objective of PRO-ACT is to implement and demonstrate multi-robot collaborative planning and manipulation capabilities in a lunar construction context, relying on extending and integrating the outcomes of the PERASPERA operational grants (OGs) – OG1 ESROCOS, OG2 ERGO, OG3 InFuse, OG4 I3DS, OG5 SIROM – with a focus on: (1) enabling assembly of an In-Situ Resource Utilization (ISRU) plant on the moon as precursor to human settlement and (2) partial assembly of a mobile gantry which can also be used for 3D printing building elements for assembly and construction of human habitats, and address the critical concern of dust mitigation.
| Duration: | 01.02.2019 till 30.04.2021 |
| Donee: | German Research Center for Artificial Intelligence GmbH |
| Sponsor: | European Union |
| Grant number: | EU financial support, Horizon 2020 PERASPERA, Grant Agreement Number 821903 |
| Partner: |
|
| Application Field: | Space Robotics |
| Related Projects: |
InFuse (OG3)
Common Data Fusion Framework for Space Robotics
(11.2016-
01.2019)
ESROCOS (OG1)
European Space Robot Control Operating System
(11.2016-
01.2019)
SIROM (OG5)
Standard Interface for Robotic Manipulation of Payloads in Future Space Missions
(11.2016-
02.2019)
FACILITATORS (OG6)
FACILIties for Testing (at) ORbital and Surface robotics building blocks
(11.2016-
01.2019)
LIMES
Learning Intelligent Motions for Kinematically Complex Robots for Exploration in Space
(05.2012-
04.2016)
ADE (OG10)
Autonomous Decision Making in Very Long Traverses
(02.2019-
04.2021)
|

Project details

In-Situ Resource Utilization (ISRU) enables sustainability in space exploration through the harnessing of resources that are available in space in order to create products and services for robotic exploration, human exploration and for commercial purposes.
The European Space Agency is preparing a mission to demonstrate the feasibility of ISRU on the Moon.
Such ISRU plants would serve as a source of water and oxygen, enabling human outposts, and for delivery of hydrogen and oxygen fuel to various locations in cis-lunar space.
Towards this objective, the PRO-ACT project aims to demonstrate a novel approach of deploying multiple robots to work towards achieving common goals by cooperative goal decomposition, cooperative mission planning and execution cooperative manipulation for transport and assembly of the ISRU Pilot Plant and its supporting infrastructure.
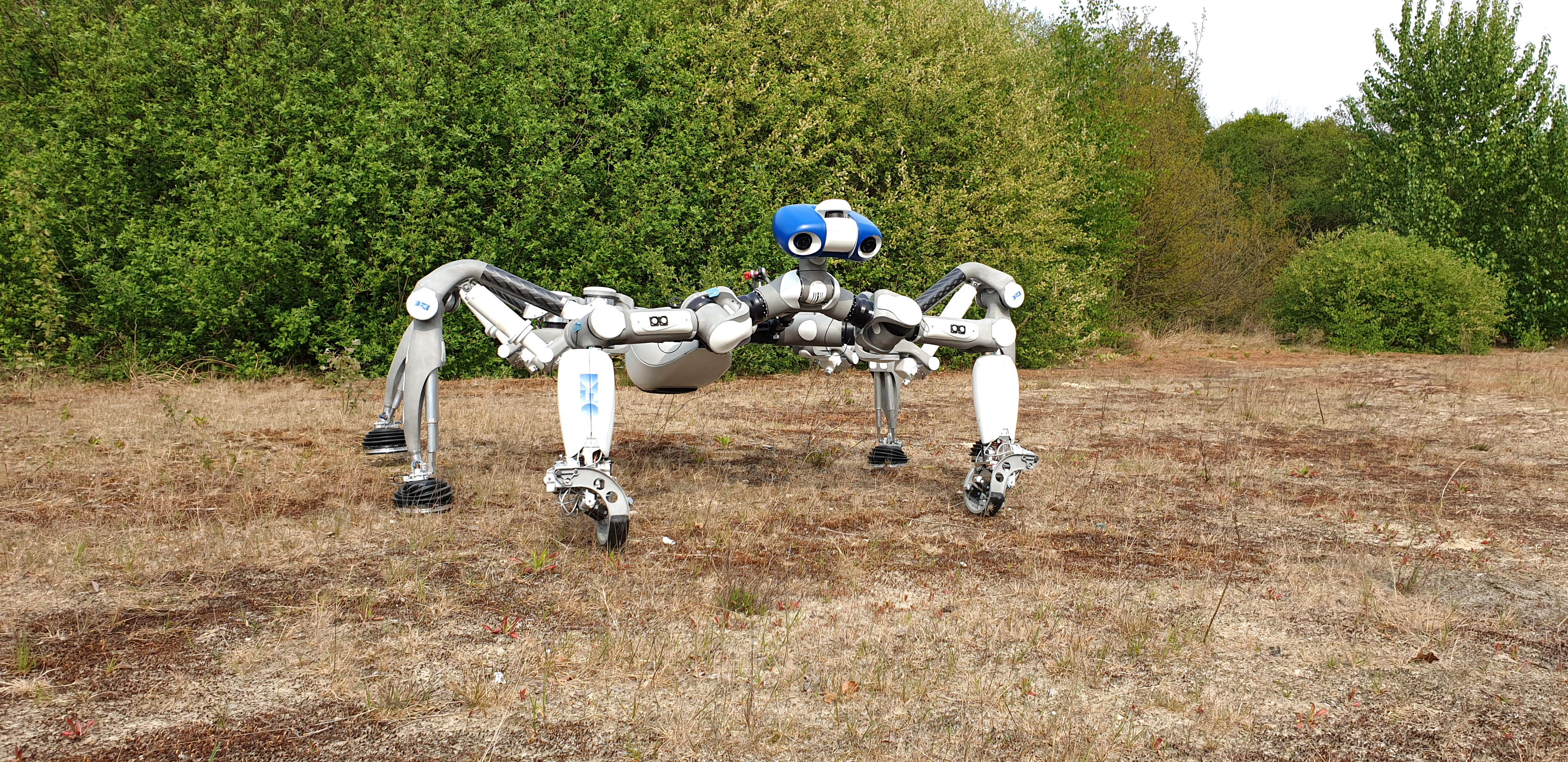
DFKI will support the multi-robot collaboration within the planetary construction scenario with the six-legged robotic system Mantis by considering and implementation of the outcomes of the previous OGs 1-5 in PERASPERA.
PRO-ACT is part of the project “PER ASPERA (ad ASTRA)” (Latin meaning “Through hardships to the stars”), which is funded by a grant by the European Union through the Horizon 2020 Programme.
Videos
PRO-ACT: Multi-Robot Cooperation in Space
Multi-robotics cooperation is one of several key technologies that are seen as promising for planetary exploration. In the PRO-ACT project, these technologies were applied and further developed. The involved robotic systems VELES (a six-wheeled rover from PIAP Space, Poland), Mantis (a six-legged walking robotic system from DFKI, Germany) and the Mobile Gantry (a four-wheeled gantry with a 3d printer from AVS, Spain) were foreseen to perform tasks together. In the last months of the project, the Corona pandemic situation worsened, and as a result, travel restrictions also increased, so that the joint tests with the robotic systems could not be carried out together as planned. The video gives an insight into how the cooperative tasks could still be tested to successfully complete the project.
Other videos show the final tests conducted in more technical detail.
PRO-ACT: Planetary Robots Deployed for Assembly and Construction Tasks
The animation shows the planned mission scenarios of the three robotic systems involved.
The robotic systems involved are Mantis from the Robotics Innovation Center of the German Research Center for Artificial Intelligence (DFKI) in Germany, VELES from Piap Space in Poland and the mobile gantry from AVS in Spain.
Intelligent space robotics: scientist Wiebke Brinkmann speaks on the EU-funded research in Bremen