PERIOD (OG12)
PERASPERA In-Orbit Demonstration (Operational Grant 12)
")
The PERASPERA In-Orbit Demonstration (PERIOD) project is one of the operational grants (OGs) of the third phase of the European Union’s Horizon 2020 Space Strategic Research Cluster on Space Robotics Technologies with an objective to increase the maturity of space technologies and prepare them for an in-orbit demonstration, planned within the 2023-2027 timeframe. Specifically, the project will build upon the work of previous OGs to raise the technology readiness level of core technologies and define an orbital demonstration concept for on-orbit servicing and assembly. The DFKI’s tasks within the project consist mainly of the evaluation of the state-of-the-art standard interconnects, used to interconnect (modular) systems/components, with respect to the demonstration scenario and definition of a conceptual cyber-physical system architecture for an in-orbit manufacturing and assembly system.

Project details

Since the launch of the first artificial satellite, the very nature of spaceflight has heavily constrained every space mission in terms of mass, lifetime and ultimately cost. The results of this are mostly single-use, highly integrated space systems that are difficult to service and/or upgrade should the need arise. At the same time the current proliferation of the space debris calls for a more sustainable use of the on-orbit environment which is difficult to achieve with the currently adopted mission paradigm. All these facts point toward the need of a paradigm shift of space missions and morphology of spacecraft design to enable cost-effective on-orbit servicing and assembly that could reduce the lifecycle cost of spacecraft while increasing their capability and flexibility in case of failure or unexpected events.
The Horizon 2020 Space Strategic Research Cluster (SRC) on Space Robotics Technologies is the approach adopted by the European Union to achieve this paradigm shift by gradually increasing the maturity of space robotics technologies for on-orbit servicing and assembly and validating them in the 2023-2027 timeframe with sizeable demonstration missions.
The PERASPERA In-Orbit Demonstration (PERIOD) project is one of the operational grants (OGs) of the third phase of the SRC with an objective to define an orbital demonstrator concept while capitalizing on the work of the previous phases of the SRC that have addressed the designing, manufacturing, and testing of reliable and high-performance robotic building blocks.
The specific objectives of the project are:
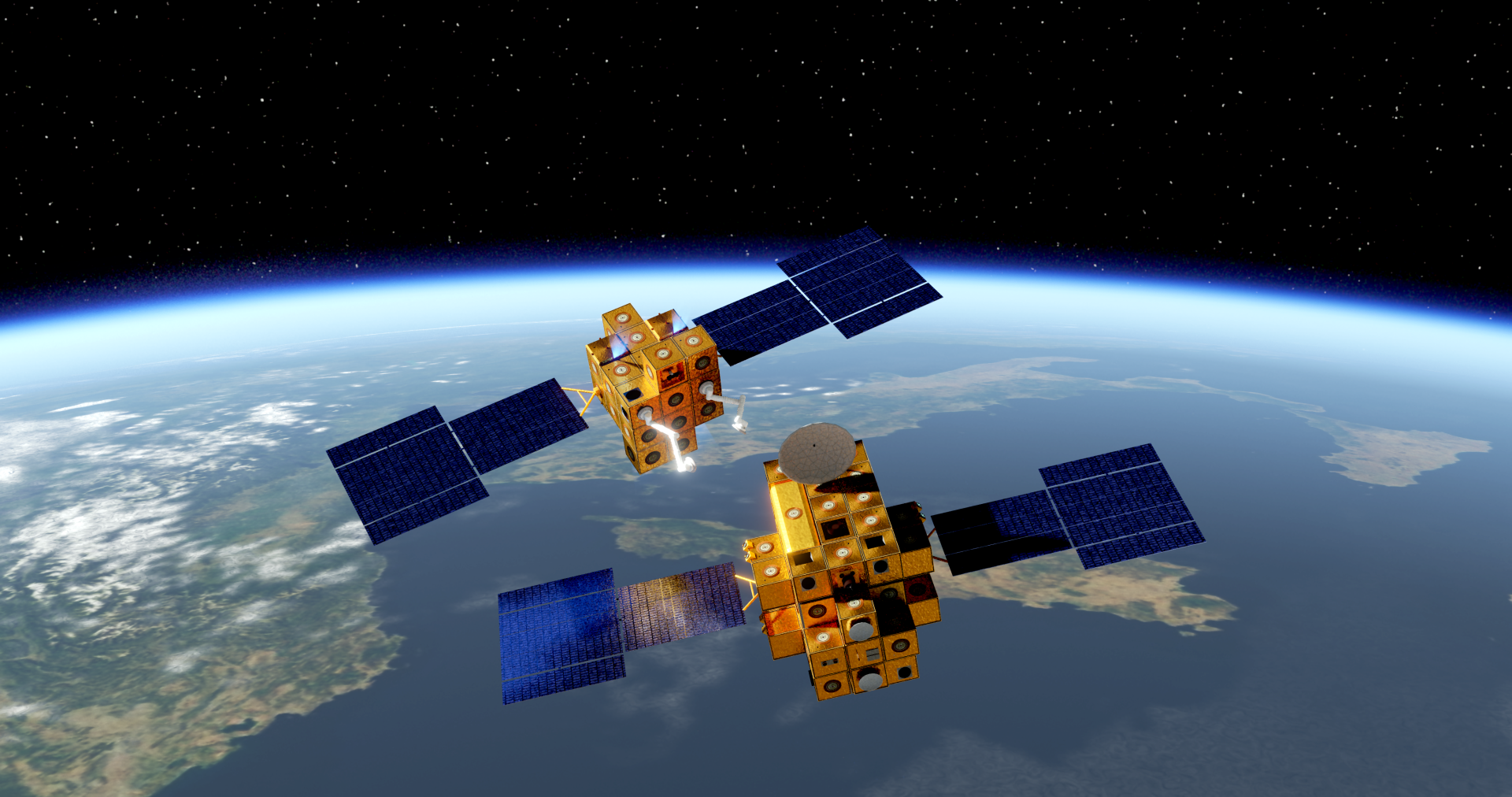
a) Define a demonstrator concept based on an orbital factory, integrated on the Bartolomeo platform of the International Space Station, to manufacture and operate a spacecraft in-orbit.
b) Further develop core space robotics software components up to the technology readiness level five.
c) Evaluate the current state-of-the-art standard interfaces in a benchmark scenario.
d) Evaluate all the core components for assembly on a breadboard.
e) Implement communication and dissemination activities to inform the space community and potential customers on the capabilities of on-orbit servicing and assembly as well as provide transparency on risks and mitigations.
The DFKI’s tasks within the project address specifically:
a) The evaluation of the current state-of-the-art standard interfaces in a representative benchmark scenario.
b) The definition of preliminary requirements and development logic of the perception and representation components of the orbital factory.
c) The definition of a conceptual cyber-physical system architecture of the orbital factory and a proof-of-concept of a selected aspect.
Further information about the PERIOD can be found at the following URL: https://period-h2020.eu/
Videos
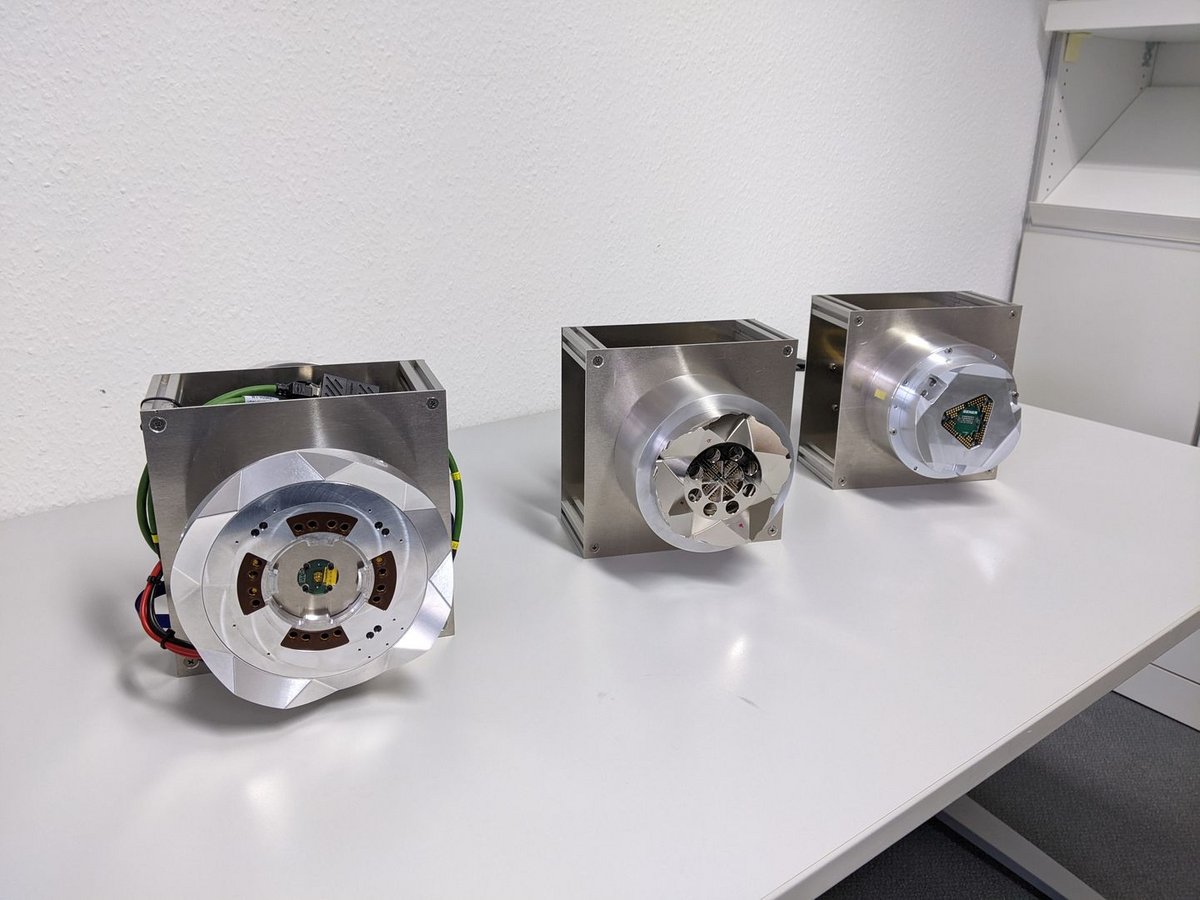
PERIOD: Standard Interconnect Benchmark for Orbital Factory
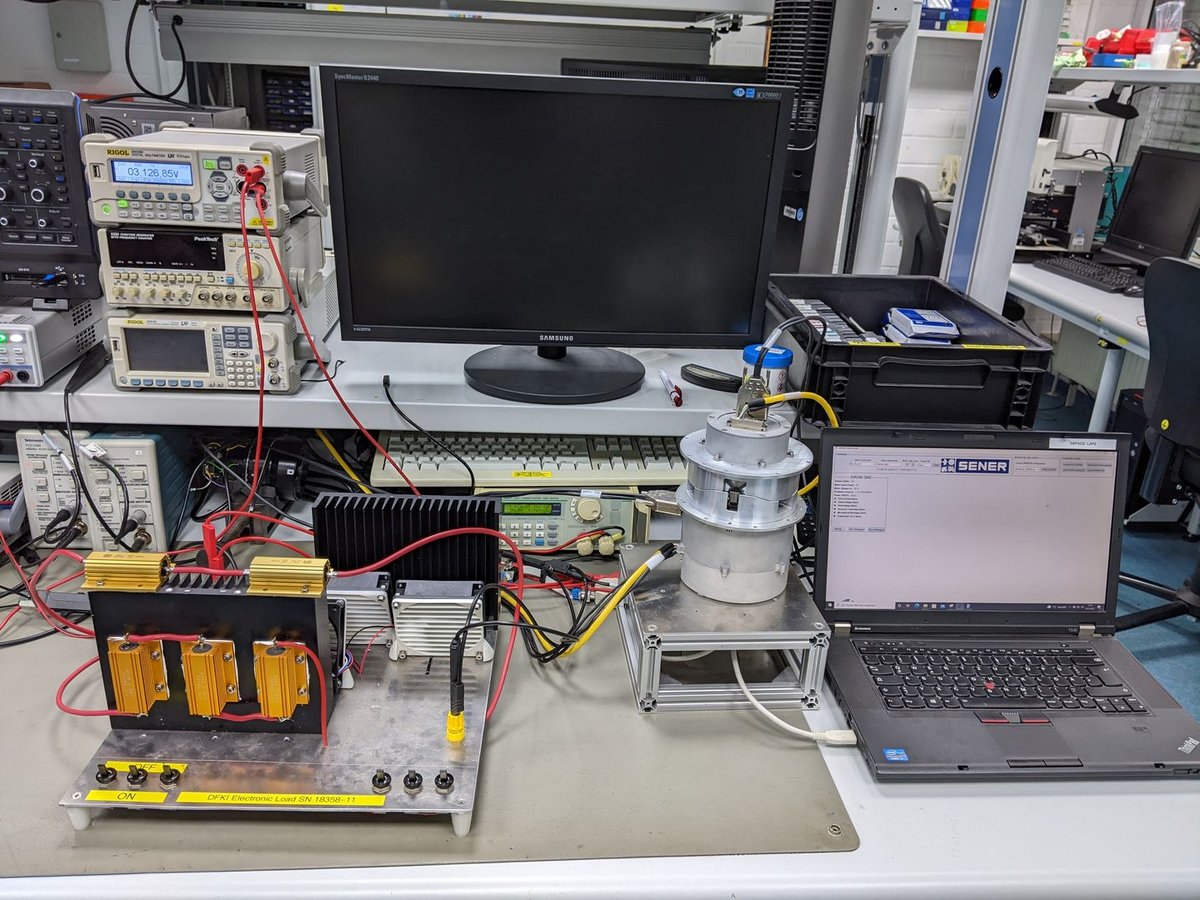
Future orbital factories will require standardized components to manufacture and assemble modular spacecraft. One of such components is a multifunctional interconnect which allows to connect different subsystems of a modular spacecraft mechanically and electrically. To select the most appropriate one for the envisioned demonstration scenario of the PERIOD project a benchmark was performed at DFKI on the three European state-of-the-art interconnects. The tests compared the electrical and mechanical capabilities of the interconnects and set a precedent on how to design and execute future benchmarks of multifunctional interconnects.
SIROM: Capture range tests
Mechanical test of the SIROM from SENER Aeroespacial S.A. verifying its capture range.
HOTDOCK: Misalignment test
Mechanical test of the HOTDOCK from Space Applications Services NV verifying its misalignment capabilities using guiding petals.
HOTDOCK: Release under load tests
Mechanical tests of the iSSI® from iBOSS GmbH, HOTDOCK from Space Applications Services NV and SIROM from SENER Aeroespacial S.A. identifying their capabilities to perform a release of a coupled interface under load. Please note that the behaviour of interfaces during the depicted tests is unsuitable for direct comparison given different numeric values used for initial axial, radial and angular misalignments.
Photos