MerdROV
Evaluation of navigation-concepts for UUVs in fish-farms

MerdROV is sponsored by the Norwegian ministry of research and is conducted by ARGUS Remotesystens (NO), Sintef (NO), NTNU (NO), Leroy Hydrotech (NO) und DFKI RIC (DE). The goal of MerdROV is the usage of ROV technologies for inspection and cleaning for the nets of fish-farms. The tasks of the DFKI RIC within MerdROV is the evaluation of methods for localisation of ROVs while driving along the nets. Different methods, optical and acoustical, will be evaluated by experiments within the DFKI RIC test-tanks and on real-life data from ROVs being deployed in Norway. The primary systems used by DFKI RIC are DAGON and the 3D portalcrane in the DFKI underwater testbed.
| Duration: | 01.01.2012 till 31.12.2013 |
| Donee: | German Research Center for Artificial Intelligence GmbH |
| Sponsor: | Norwegian Ministry of Education and Research |
| Partner: | Sintef Norwegen, Argus Remote Systems AS Norwegen |
| Application Field: | Underwater Robotics |
| Related Projects: |
CUSLAM
Localization and mapping in confined underwater environments
(09.2009-
07.2012)
CSurvey
A semi-autonomous inspection unit for underwater structures and ship hulls - subproject of CView compound-project
(05.2009-
04.2012)
|
| Related Robots: |
DAGON
|
Project details


Inspection and cleaning of the nets of fish famrs is very time-consuming. During the summer months the removal of algae and plants from the nets has to be done every two weeks. Damages to the net, such as ruptures, allows the fishes within the farm to escape into the wilderness, which not only reduces the output of the farm but threatens the wildlife by the introduction of breeded fish into the ecosystem. The ecological an economical operation of large-scale fish farms is a major research topic in Norway. Especially with respect to the technical problems, Norway searches for research co-operations within the EU.
MerdROV is sponsored by the Norwegian research ministry. It is a joint project of the Norwegian partners ARGUS Remotesystems, Sintef, NTNU, Leroy Hydrotech and the German partner DFKI RIC. The goal of MerdROV is the deployment of ROV technologies to inspect and clean the nets of fish farms.
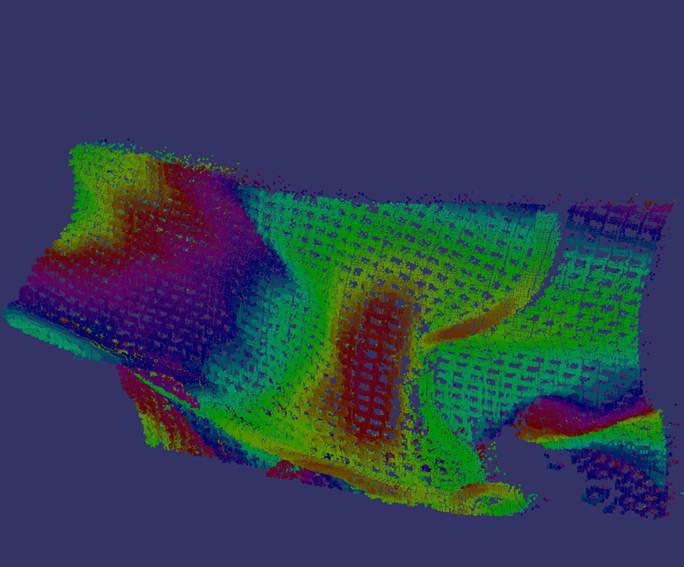
The task of the DFKI RIC within MerdROV is the evaluation of methods to localise ROVs operating at the nets inside of fish farms. The scope of this evaluation is the performance of classical, sonar based as well as new optical localisation-methods within the environment of a fishfarm. The open strucutre of the nets, the insatllations within the farm (e.g. feeding machines) and the fishes themself are potential source for disturbances on the localisation.
The first evaluation will be done with a net sample under controlled conditions within the test-tanks of DFKI RIC and a lake nearby the DFKI in Bremen. The data will be aquired using the AUV DAGON and the testrigs within the underwater testbed. Based on the evaluation of these experiments further tests in Norway, using a ROV, will be conducted. All data will be evaluated and a review of the different methods will be presented to the partners.