Publications
2019
Transfer approach for the detection of missed task-relevant events in P300-based brain-computer interfaces
Elsa Andrea Kirchner, Su-Kyoung Kim
In Proceedings in the 9th International IEEE EMBS Conference On Neural Engineering (NER’19), (NER-2019), 20.3.-23.3.2019, San Francisco, CA, IEEE Xplore, pages 134-138, 2019.
Embedded Multimodal Interfaces in Robotics: Applications, Future Trends, and Societal Implications
Elsa Andrea Kirchner, Stephen Fairclough, Frank Kirchner
Editors: S. Oviatt, B. Schuller, P. Cohen, D. Sonntag, G. Potamianos, A. Krueger
In The Handbook of Multimodal-Multisensor Interfaces, Morgan & Claypool Publishers, volume 3, chapter 13, pages 523-576, 2019. ISBN: e-book: 978-1-97000-173-0, hardcover: 978-1-97000-175-4, paperback: 978-1-97000-172-3, ePub: 978-1-97000-174-7.
2018
Multi-tasking and Choice of Training Data Influencing Parietal ERP Expression and Single-trial Detection - Relevance for Neuroscience and Clinical Applications
Elsa Andrea Kirchner, Su-Kyoung Kim
Editors: Mikhail Lebedev
In Frontiers in Neuroscience, n.a., volume 12, pages n.a., Mar/2018.
CAEMO - A Flexible and scalable high performance matrix algebra coprocessor for embedded reconfigurable computing systems
Hendrik Wöhrle, Frank Kirchner
In Microprocessors and Microsystems, Elsevier, volume o.A., pages 47-63, Feb/2018.
2017
Eingebettete Biosignalverarbeitung und integrierte Regelung eines Ganzkörper-Exoskelettes für die Neurorehabilitation
Hendrik Wöhrle, Elsa Andrea Kirchner
In Proceedings of the 2. VDI Fachkonferenz Humanoide Roboter, 05.12.-06.12.2017, München, VDI Fachkonferenz Humanoide Roboter, Dec/2017.
A Hybrid FPGA-Based System for EEG- and EMG-Based Online Movement Prediction
Hendrik Wöhrle, Marc Tabie, Su-Kyoung Kim, Frank Kirchner, Elsa Andrea Kirchner
In Sensors - Open Access Journal, MDPI, volume 17, number 7, pages 1552, Jul/2017.
2016
A periodic spatio-spectral filter for event-related potentials
Foad Ghaderi, Su-Kyoung Kim, Elsa Andrea Kirchner
In Computers in Biology and Medicine - An International Journal, Elsevier, volume 79, number DOI: 10.1016/j.compbiomed.2016.10.004, pages 286-298, Dec/2016.
An intelligent man-machine interface - multi-robot control adapted for task engagement based on single-trial detectability of P300
Elsa Andrea Kirchner, Su-Kyoung Kim, Hendrik Wöhrle, Marc Tabie, Michael Maurus, Frank Kirchner
In Frontiers in Human Neuroscience, Frontiers, volume 10, pages 291, Jun/2016.
Handling few training data: classifier transfer between different types of error-related potentials
Su-Kyoung Kim, Elsa Andrea Kirchner
In IEEE Transactions on Neural Systems & Rehabilitation Engineering, IEEE, volume 24, number 3, pages 320-332, Mar/2016.
Embedded Brain Reading - Sichere und intuitive Mensch-Maschine-Interaktion
Elsa Andrea Kirchner, Rolf Drechsler
In Industrie 4.0 Management, Gito mbH Verlag für Industrielle Informationstechnik und Organisation, volume 4, number 2/2016, pages 37-40, Mar/2016.
2015
Backtransformation: A new representation of data processing chains with a scalar decision function
Mario Michael Krell, Sirko Straube
In Advances in Data Analysis and Classification, Springer, volume 11, number 2, pages 415-439, Dec/2015.
Reconfigurable Hardware-Based Acceleration for Machine Learning and Signal Processing
Hendrik Wöhrle, Frank Kirchner
In Formal Modeling and Verification of Cyber-Physical Systems: 1st International Summer School on Methods and Tools for the Design of Digital Systems, (SyDe-2015), 09.9.-11.9.2015, Bremen, Springer Fachmedien Wiesbaden, series Lecture Notes in Computer Science, pages 311-313, Sep/2015.
Intuitive Interaction with Robots - Technical Approaches and Challenges
Elsa Andrea Kirchner, José de Gea Fernández, Peter Kampmann, Martin Schröer, Jan Hendrik Metzen, Frank Kirchner
In Formal Modeling and Verification of Cyber Physical Systems, Springer Heidelberg, pages 224-248, Sep/2015. ISBN: 978-3-658-09993-0.
An Adaptive Spatial Filter for User-Independent Single Trial Detection of Event-Related Potentials
Hendrik Wöhrle, Mario Michael Krell, Sirko Straube, Su-Kyoung Kim, Elsa Andrea Kirchner, Frank Kirchner
In IEEE Transactions on Biomedical Engineering, IEEE, volume 62, number 7, pages 1696-1705, Jul/2015.
Choice of training data for classifier transfer in error related potentials based on signal characteristics
Su-Kyoung Kim, Elsa Andrea Kirchner
In Proceedings of the 7th International IEEE EMBS Conference on Neural Engineering, (NER-2015), 22.4.-24.4.2015, Montpellier, IEEE, pages 102-105, Apr/2015.
Generalizing, Decoding, and Optimizing Support Vector Machine Classification
Mario Michael Krell
pages 256, Bremen, Mar/2015. University of Bremen.
New one-class classifiers based on the origin separation approach
Mario Michael Krell, Hendrik Wöhrle
In Pattern Recognition Letters, Elsevier, volume 53, pages 93-99, Feb/2015.
Spatio-temporal Comparison between ERD/ERS and MRCP-based Movement Prediction
Anett Seeland, Laura Manca, Frank Kirchner, Elsa Andrea Kirchner
In Proceedings of the 8th International Conference on Bio-inspired Systems and Signal Processing (BIOSIGNALS-15), (Biosignalis-15), 12.1.-15.1.2015, Lisbon, ScitePress, pages 219-226, Jan/2015.
Intrinsische Intentionserkennung in Technischen Systemen
Elsa Andrea Kirchner
Editors: Steffen Hölldobler
In GI-Edition: Lecture Notes in Informatics, Ausgezeichnete Informatikdissertationen 2014, Bonner Köllen Verlag, pages 119-128, 2015. ISBN: 978-3-88579-419-6.
Learning from the past: post processing of classification scores to find a more accurate and earlier movement prediction
Sirko Straube, David Feess, Anett Seeland
Editors: Jose Luis Pons, Rovira Pedro Encarnacao, Ana Rita Londral
In Neurotechnology, Electronics, and Informatics: Revised Selected Papers from Neurotechnix 2013, Springer International Publishing, series Springer Series in Computational Neuroscience, volume 13, pages 91-107, 2015. ISBN: 978-3-319-15997-3.
Online Adaptation of a Man-Machine Interface with Respect to Task Engagement and Task Load
Elsa Andrea Kirchner, Su-Kyoung Kim, Hendrik Wöhrle, Marc Tabie, Johannes Teiwes, Frank Kirchner
In Proceedings of the 11. Berliner Werkstatt Mensch-Maschine-Systeme (BWMMS), 2015, (BWMMS), 07.10.-09.10.2015, Berlin, BWMMS, 2015.
2014
Correction of Robot Behavior based on Brain State Analysis
Su-Kyoung Kim
series DFKI Documents, volume 14-07, pages 19, Nov/2014. DFKI GmbH, Universität Bremen.
Predictions of Movements by Online Analysis of Electroencephalogram with Dataflow Accelerators
Hendrik Wöhrle, Johannes Teiwes, Marc Tabie, Anett Seeland, Elsa Andrea Kirchner, Frank Kirchner
series DFKI Documents, volume 14-07, pages 10, Nov/2014. DFKI GmbH, Universität Bremen.
Prediction of Movements by Online Analysis of Electroencephalogram with Dataflow Accelerators
Hendrik Wöhrle, Johannes Teiwes, Marc Tabie, Anett Seeland, Elsa Andrea Kirchner, Frank Kirchner
In International Congress on Neurotechnology, Electronics and Informatics, (NEUROTECHNIX), 25.10.-26.10.2014, Rome, SpringerSCITEPRESS – Science and Technology Publications, Oct/2014.
Reconfigurable Dataflow Hardware Accelerators for Machine Learning and Robotics
Hendrik Wöhrle, Johannes Teiwes, Mario Michael Krell, Anett Seeland, Elsa Andrea Kirchner, Frank Kirchner
In Proceedings of European Conference on Machine Learning and Principles and Practice of Knowledge Discovery in Databases, (ECML PKDD-2014), 15.9.-19.9.2014, Nancy, Springer, pages 129-138, Sep/2014.
Generalizing, Optimizing, and Decoding Support Vector Machine Classification
Mario Michael Krell, Sirko Straube, Hendrik Wöhrle, Frank Kirchner
In European Conference on Machine Learning and Principles and Practice of Knowledge Discovery in Databases, (ECML PKDD-14), 15.9.-19.9.2014, Nancy, o.A., Sep/2014.
Processing of Physiological Data on FPGAs using reSPACE
Hendrik Wöhrle, Johannes Teiwes, Mario Michael Krell, Elsa Andrea Kirchner
In Passive BCI Community Meeting, (BCI-2014), 16.7.-18.7.2014, Delmenhorst, Hanse Wissenschaft Kolleg, Jul/2014.
Our Tools for Large Scale or Embedded Processing of Physiological Data
Mario Michael Krell, Elsa Andrea Kirchner, Hendrik Wöhrle
In Passive BCI Community Meeting, (BCI-14), 16.7.-18.7.2014, Delmenhorst, o.A., Jul/2014.
Introduction to the Signal Processing and Classification Environment pySPACE
Mario Michael Krell
In PyData Berlin 2014, 25.7.-27.7.2014, Berlin, o.A., Jul/2014.
Embedded Brain Reading - Passive and Active Support for Robotic Applications
Elsa Andrea Kirchner
In Passive BCI Community Meeting, (BCI-2014), 16.7.-18.7.2014, Delmenhorst, o.A., Jul/2014.
Signal Processing and Machine Learning on Reconfigurable Hardware
Hendrik Wöhrle, Johannes Teiwes
In Proceedings of the RIC Project Day Workgroups "Electronic Design" and "Mechatronic Design", 24.7.2014, Bremen, Selbstverlag, series DFKI Documents, volume 14-05, pages 48-49, Jul/2014. DFKI Robotics Innovation Center Bremen. DFKI GmbH. ISBN: ISSN 0946-0098.
On the effectiveness of ICA based eye artifact removal from EEG windows of different lengths
Foad Ghaderi, Elsa Andrea Kirchner
In The 11th International Conference on Biomedical Engineering, (BioMed-14), 23.6.-25.6.2014, Zürich, o.A., Jun/2014.
Balanced Relative Margin Machine -The missing piece between FDA and SVM classification
Mario Michael Krell, David Feess, Sirko Straube
In Pattern Recognition Letters, Elsevier, volume 41, pages 43-52, May/2014.
How to evaluate an agents behaviour to infrequent events? - Reliable performance estimation insensitive to class distribution
Sirko Straube, Mario Michael Krell
In Frontiers in Computational Neuroscience, frontiers, volume 8, number 43, pages o.A., Apr/2014.
Runtime Calibration of online EEG based Movement Prediction using EMG Signals
Marc Tabie, Hendrik Wöhrle, Elsa Andrea Kirchner
In BIOSIGNALS 2014 - Proceedings of the International Conference on Bio-inspired Systems and Signal Processing, (Biosignalis-2014), 03.3.-06.3.2014, Angers, SCITEPRESS Digital Library, Mar/2014.
Effects of eye artifact removal methods on single trial P300 detection, a comparative study
Foad Ghaderi, Su-Kyoung Kim, Elsa Andrea Kirchner
In Journal of Neuroscience Methods, Elsevier, volume Volume 221, pages 41-47, Jan/2014.
Online Detection of P300 related Target Recognition Processes During a Demanding Teleoperation Task
Hendrik Wöhrle, Elsa Andrea Kirchner
In Proceedings of the International Conference on Physiological Computing Systems, (PHYCS-14), 07.1.-09.1.2014, Lissabon, Scitepress Digital Library, Jan/2014.
Multimodal Movement Prediction - Towards an Individual Assistance of Patients
Elsa Andrea Kirchner, Anett Seeland, Marc Tabie
In PLoS ONE, Public Library of Science, volume 9, number 1, pages e85060, 2014.
Online Classifier Adaptation for the Detection of P300 Target Recognition Processes in a Complex Teleoperation Scenario
Hendrik Wöhrle, Elsa Andrea Kirchner
In Physiological Computing Systems, Springer, LCNS, pages 105-119, 2014. ISBN: 978-3-662-45685-9.
2013
On the Applicability of Brain Reading for Predictive Human-Machine Interfaces in Robotics
Elsa Andrea Kirchner, Su-Kyoung Kim, Sirko Straube, Anett Seeland, Hendrik Wöhrle, Mario Michael Krell, Marc Tabie, Manfred Fahle
In PLoS ONE, Public Library of Science, volume 8, number 12, pages e81732, Dec/2013.
pySPACE - a signal processing and classification environment in Python
Mario Michael Krell, Sirko Straube, Anett Seeland, Hendrik Wöhrle, Johannes Teiwes, Jan Hendrik Metzen, Elsa Andrea Kirchner, Frank Kirchner
In Frontiers in Neuroinformatics, frontiers, volume 7, number 40, pages 1-11, Dec/2013.
A Comparison of Effective Connectivity Methods Using Different Performance Metrics
Su-Kyoung Kim, Suraj Kumar Sanga, Elsa Andrea Kirchner
In Proceedings of the 6th International IEEE EMBS Conference on Neural Engineering, (NER-2013), 06.11.-08.11.2013, San Diego, CA, o.A., pages 823-826, Nov/2013.
Online Movement Prediction in a Robotic Application Scenario
Anett Seeland, Hendrik Wöhrle, Sirko Straube, Elsa Andrea Kirchner
In Proceedings of the 6th International IEEE EMBS Conference on Neural Engineering, (NER-2013), 06.11.-08.11.2013, San Diego, CA, o.A., pages 41-44, Nov/2013.
Human Force Discrimination during Active Arm Motion for Force Feedback Design
Shams Feyzabadi, Sirko Straube, Michele Folgheraiter, Elsa Andrea Kirchner, Su-Kyoung Kim, Jan Albiez
In IEEE Transactions on Haptics, oA, volume 6, number 3, pages 309-319, Nov/2013.
Classifier Transferability in the Detection of Error Related Potentials from Observation to Interaction
Su-Kyoung Kim, Elsa Andrea Kirchner
In Proceedings of the IEEE International Conference on Systems, Man, and Cybernetics, (SMC-2013), 13.10.-16.10.2013, Manchester, IEEE, pages 3360-3365, Oct/2013.
An adaptive and efficient spatial filter for event-related potentials
Foad Ghaderi, Sirko Straube
In Proceedings of European Signal Processing Conference, (EUSIPCO-2013), 09.9.-13.9.2013, Marrakesh, o.A., Sep/2013.
Striving for better and earlier movement prediction by postprocessing of classification scores
Sirko Straube, Anett Seeland, David Feess
In Proceedings of the Neurotechnix 2013, (NEUROTECHNIX-2013), 18.9.-20.9.2013, Vilamoura, SCITEPRESS, pages 13-20, Sep/2013. ISBN: 978-989-8565-80-8.
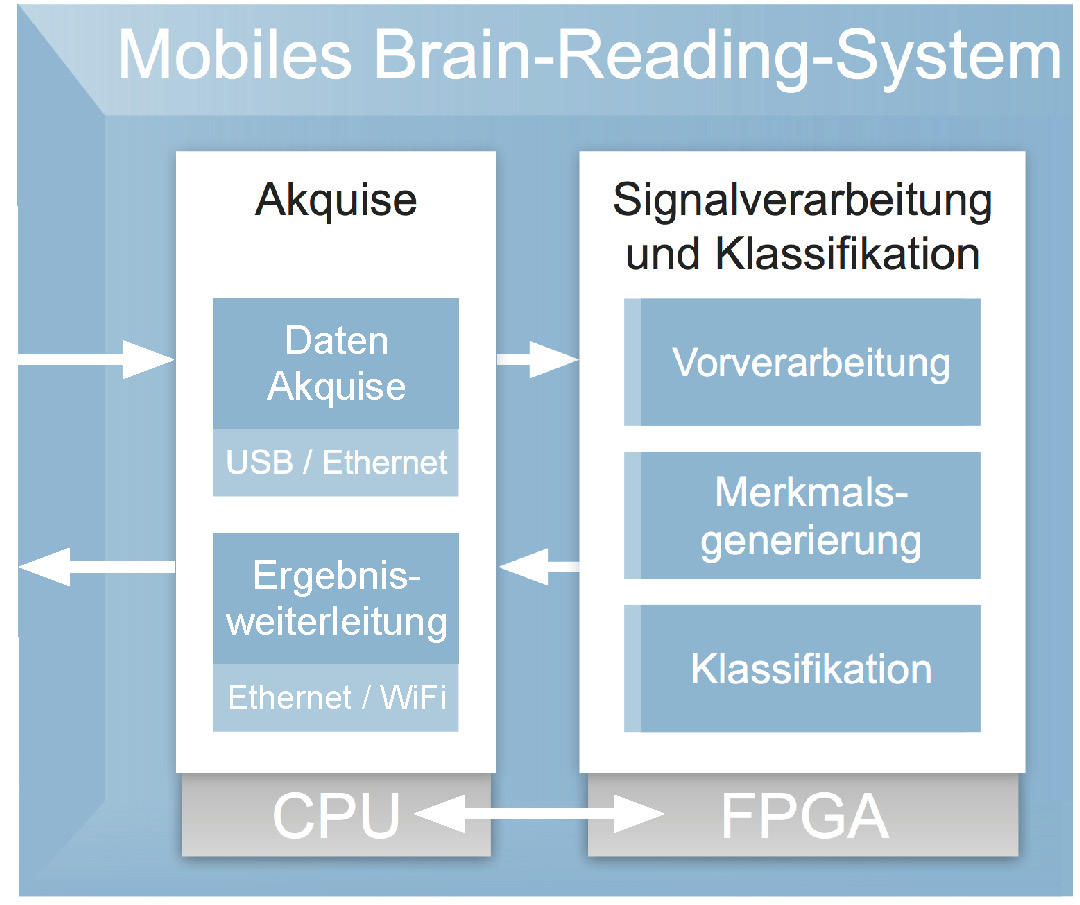
A Dataflow-Based Mobile Brain Reading System on Chip with Supervised Online Calibration
Hendrik Wöhrle, Johannes Teiwes, Mario Michael Krell, Elsa Andrea Kirchner, Frank Kirchner
In Congress Proceedings (http://www.neurotechnix.org/), (NEUROTECHNIX-2013), 18.9.-20.9.2013, Vilamoura, SCITEPRESS Digital Library, Sep/2013.
Joint spatial and spectral filter estimation for single trial detection of Event Related potentials
Foad Ghaderi
In IEEE International Workshop on Machine Learning for Signal Proceeding, (MLSP-2013), 22.9.-25.9.2013, Southhampton, o.A., Sep/2013.
Memory and Processing Efficient Formula for Moving Variance Calculation in EEG and EMG Signal Processing
Mario Michael Krell, Marc Tabie, Hendrik Wöhrle, Elsa Andrea Kirchner
In Proceedings of International Congress on Neurotechnology, Electronics and Informatics, (NEUROTECHNIX-2013), 19.9.-20.9.2013, Vilamoura, SCITEPRESS Digital Library, pages 41-45, Sep/2013.
EEG in Dual-Task Human-Machine Interaction: On the Feasibility of EEG based Support of Complex Human-Machine Interaction
Elsa Andrea Kirchner, Su-Kyoung Kim, Manfred Fahle
In Perception, o.A., volume 42 ECVP Abstract Supplement, pages 220-220, Aug/2013.
Looking at ERPs from Another Perspective: Polynomial Feature Analysis
Sirko Straube, David Feess
In Perception - ECVP Abstract Supplement, (ECVP-2013), 25.8.-29.8.2013, Bremen, Pion Ltd., volume 42, pages 220, Aug/2013.
Comparison of distributed source localization methods for EEG data
Anett Seeland, Sirko Straube, Frank Kirchner
In Perception - ECVP Abstract Supplement, (ECVP-2013), 25.8.-29.8.2013, Bremen, Pion Ltd., volume 42, pages 220, Aug/2013.
Comparison of Sensor Selection Mechanisms for an ERP-Based Brain-Computer Interface
David Feess, Mario Michael Krell, Jan Hendrik Metzen
In PLoS ONE, Public Library of Science, volume 8, number 7, pages e67543, Jul/2013.
Towards Formalization of Embedded Brain Reading
Elsa Andrea Kirchner, Rolf Drechsler
In Design, Automation & Test in Europe 2013, (DATE-2013), 18.3.-22.3.2013, Grenoble, o.A., Mar/2013.
Towards Assistive Robotics for Home Rehabilitation
Elsa Andrea Kirchner, Jan Albiez, Anett Seeland, Mathias Jordan, Frank Kirchner
In Proceedings of the 6th International Conference on Biomedical Electronics and Devices, (BIODEVICES-13), 11.2.-14.2.2013, Barcelona, o.A., Feb/2013.
An EMG-based assistive orthosis for upper limb rehabilitation
Luis Manuel Vaca Benitez, Niels Will, Marc Tabie, Steffen Schmidt, Elsa Andrea Kirchner, Jan Albiez
In International Conference on Biomedical Electronics and Devices, (BIODEVICES-2013), 11.2.-14.2.2013, Barcelona, o.A., Feb/2013.
Single Trial ERP detection Exploiting Sparsity in Time
Foad Ghaderi
In Proceedings of the International Biomedical and Astronomical Signal Processing (BASP) Frontiers Workshop, (BASP-2013), 27.1.-01.2.2013, Villars-sur-Ollon, o.A., pages 62, Feb/2013.
Periodic Spatial Filter for Single Trial Classification of Event Related Brain Activity
Foad Ghaderi, Elsa Andrea Kirchner
In Proceedings of the 10th International Conference on Biomedical Engineering, (BioMed-2013), 13.2.-15.2.2013, Innsbruck, o.A., Feb/2013.
EMG Onset Detection - Comparison of different methods for a movement prediction task based on EMG
Marc Tabie, Elsa Andrea Kirchner
In In Proceedings of the 6th International Conference on Bio-inspired Systems and Signal Processing, (Biosignalis-2013), 11.2.-14.2.2013, Barcelona, o.A., Feb/2013.
A Framework for High Performance Embedded Signal Processing and Classification of Psychophysiological Data
Hendrik Wöhrle, Johannes Teiwes, Elsa Andrea Kirchner, Frank Kirchner
In APCBEE Procedia, (ICBET-2013), 19.5.-20.5.2013, Kopenhagen, Elsevier, 2013.
Learning in Compressed Space
Alexander Fabisch, Yohannes Kassahun, Hendrik Wöhrle, Frank Kirchner
In Neural Networks, Elsevier, volume 42, pages 83-93, 2013.
2012
Preliminary results on P300 detection using machine learning when modulating task reaction time
Su-Kyoung Kim, Elsa Andrea Kirchner
In Proceedings of the 18th Annual Meeting of the Organization for Human Brain Mapping, (OHBM-2012), 10.6.-14.6.2012, Bejing, o.A., Jun/2012.
EEG in Dual-Task Human-Machine Interaction: Target Recognition and Prospective Memory
Elsa Andrea Kirchner, Su-Kyoung Kim
In Proceedings of the 18th Annual Meeting of the Organization for Human Brain Mapping, (OHBM-12), 10.6.-14.6.2012, Beijing, o.A., Jun/2012.
Measuring the Improvement of the Interaction Comfort of a Wearable Exoskeleton
Michele Folgheraiter, Mathias Jordan, Sirko Straube, Anett Seeland, Su-Kyoung Kim, Elsa Andrea Kirchner
In International Journal of Social Robotics, Springer Netherlands, volume 4, number 3, pages 285-302, Mar/2012.
Learning Parameters of Linear Models in Compressed Parameter Space
Yohannes Kassahun, Hendrik Wöhrle, Alexander Fabisch, Marc Tabie
Editors: Alessandro E. Villa, Włodzisław Duch, Péter Érdi, Francesco Masulli, Günther Palm
In Artificial Neural Networks and Machine Learning ICANN 2012, Springer, series Lecture Notes in Computer Science, volume 7553, pages 108-115, 2012. ISBN: 978-3-642-33265-4.
2011
Choosing an Appropriate Performance Measure: Classification of EEG-Data with Varying Class Distribution
Sirko Straube, Jan Hendrik Metzen, Anett Seeland, Mario Michael Krell, Elsa Andrea Kirchner
In Proceedings of the 41st Meeting of the Society for Neuroscience 2011, (Neuroscience-2011), 12.11.-16.11.2011, Washington, DC, o.A., Nov/2011.
Minimizing Calibration Time for Brain Reading
Jan Hendrik Metzen, Su-Kyoung Kim, Elsa Andrea Kirchner
In Proceedings of the 33rd Annual Symposium of the German Association for Pattern Recognition, (DAGM-11), 30.8.-02.9.2011, Frankfurt / Main, o.A., pages 366-375, Sep/2011. ISBN: 978-3-642-23122-3.
Rapid Adaptation of Brain Reading Interfaces based on Threshold Adjustment
Jan Hendrik Metzen, Elsa Andrea Kirchner
In Proceedings of the 2011 Conference of the German Classification Society, (GfKI-2011), 30.8.-02.9.2011, Frankfurt / Main, o.A., pages 138-138, Sep/2011.
On Transferring Spatial Filters in a Brain Reading Scenario
Jan Hendrik Metzen, Su-Kyoung Kim, Timo Duchrow, Elsa Andrea Kirchner, Frank Kirchner
In Proceedings of the 2011 IEEE Workshop on Statistical Signal Processing, (SSP-2011), 28.6.-30.6.2011, Nice, o.A., pages 797-800, Jun/2011. ISBN: 978-1-4577-0569-4.
2010
Towards Operator Monitoring via Brain Reading - An EEG-based Approach for Space Applications
Elsa Andrea Kirchner, Hendrik Wöhrle, Constantin Bergatt, Su-Kyoung Kim, Jan Hendrik Metzen, David Feess, Frank Kirchner
In Proceedings of the 10th International Symposium on Artificial Intelligence, Robotics and Automation in Space, (iSAIRAS-10), 29.8.-01.9.2010, Sapparo, o.A., pages 448-455, Sep/2010.