EurEx-SiLaNa
EurEx-Safe Long-Term Navigation

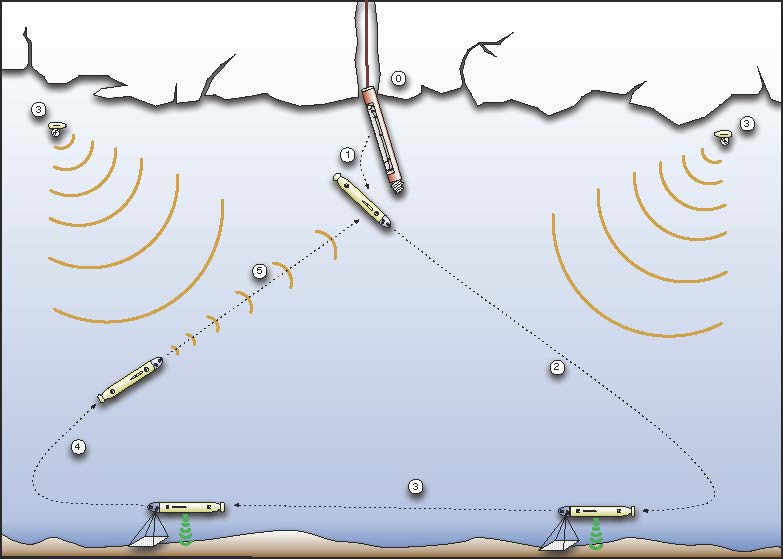
The Project "EurEx-Safe Long-Term Navigation" will improve the navigation abilities of autonomous systems in order to make them more reliable during prolonged missions. This is a key ability if complex missions are to be undertaken in scenarios, where external infrastructure and sensors are limited. The scenario in which the navigation ability will be put to the test is the EurEx-scenario, which is a mission scenario to Jupiter’s moon Europa. While such a mission will happen in the far future, EurEx-SiLaNa will work towards making such a mission a reality. One of the steps is to conduct an analogue-mission on earth, in which the feasibility of the mission scenario is demonstrated. The preparation of such a demonstration mission is part of the SiLaNa project, focussing of mission critical aspects: long-term under-ice navigation and robustness of the vehicles Leng and Teredo.
| Duration: | 01.09.2017 till 31.10.2019 |
| Donee: | German Research Center for Artificial Intelligence GmbH |
| Sponsor: |
Federal Ministry for Economic Affairs and Climate Action
German Aerospace Center e.V. |
| Grant number: | The EurEx-SiLaNa project is funded by the German Ministry for Economic Affairs and Climate Action (BMWI) (Grant No. 50 NA 1704). |
| Application Field: |
Underwater Robotics
Space Robotics |
| Related Projects: |
EurEx
Europa-Explorer
(12.2012-
04.2016)
CUSLAM
Localization and mapping in confined underwater environments
(09.2009-
07.2012)
VIPE
Exploration in terrain difficult to access (e.g. Valles Marineris) using visual and proprioceptive data.
(05.2015-
06.2018)
|
| Related Robots: |
DAGON
|