CoRob-X
Cooperative Robots for Extreme Environments

The project CoRob-X develops and demonstrates enabling technologies for multi-agent robotic teams. The primary target application is the exploration of planetary surfaces, with a focus on hard-to-reach areas. CoRob-X builds on robotic hardware provided by the project consortium and the software building blocks developed within the framework of the SRC Space Robotics Technologies. These building blocks are reused and significantly enhanced to support a multi-agent exploration team of robots.

Project details


Unmanned mobile exploration rovers have been successfully landed on the Moon as well as on Mars in the past. Additional robotic missions are planned, as for example ESA’s Exomars mission, and as of today, robots are the key enablers for the exploration of extra-terrestrial planetary surfaces. In the future, the role of robots in planetary missions will even increase. Human space flight is excessively expensive and robotic missions promise a much better ratio between scientific return and cost. Even if humans are eventually to be sent to the Moon or even to Mars, robots will be needed to prepare the ground and to provide support on site (Global Exploration Roadmap 2018).
However, although modern exploration rovers such as NASA’s Curiosity rover are masterpieces of robust engineering, they still lack many of the capabilities needed in the future for efficient robotic exploration- and support missions. This is true in particular for their locomotion capabilities, decisional autonomy and the ability to form cooperating multi-robot teams.
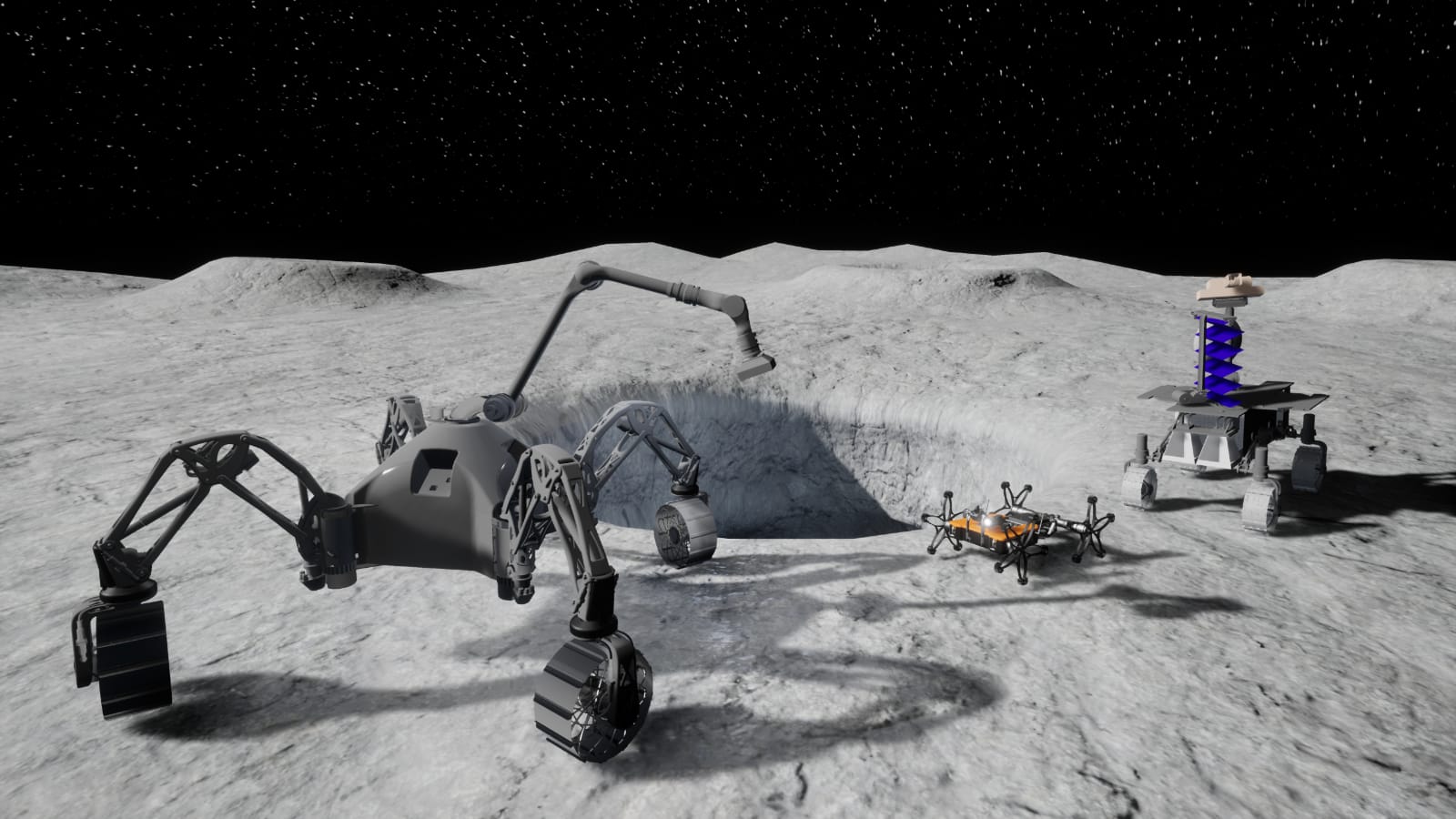
The overall objective of CoRob-X is to design, implement, and demonstrate an Advanced Robotic Exploration System (ADRES) that shows how, based on the current SoA in Space- and terrestrial robotics technologies and with a special focus on the technologies resulting from the operationa grants funded through the H2020 Strategic Research Cluster (SRC) Space Robotics Technologies, a team of autonomous and cooperating robots can access very hard-to-reach areas on planetary surfaces and achieve a science return that is so far impossible for a single robot.
CoRob-X will improve the existing SRC technology in areas such as locomotion, perception and localization, guidance, and decision making and demonstrate the capabilities of the robot team in an analogue scenario in the Canary Islands aimed at the exploration of lava tubes, which is one of the most important objectives for Moon exploration. CoRob-X will demonstrate how, even with the current SoA in robotics, future robotic exploration missions can provide the necessary capabilities in locomotion, decisional autonomy, and cooperation. CoRob-X will identify critical technologies, thoroughly evaluate the current SoA (both in Space and terrestrial robotics), identify gaps in technology and knowledge, and fill these gaps where necessary to enable a high-visibility demonstration both of a highly relevant Space science mission and a terrestrial use case.
Videos
CoRob-X: DFKI tests lava cave exploration by autonomous robot teams for future lunar missions
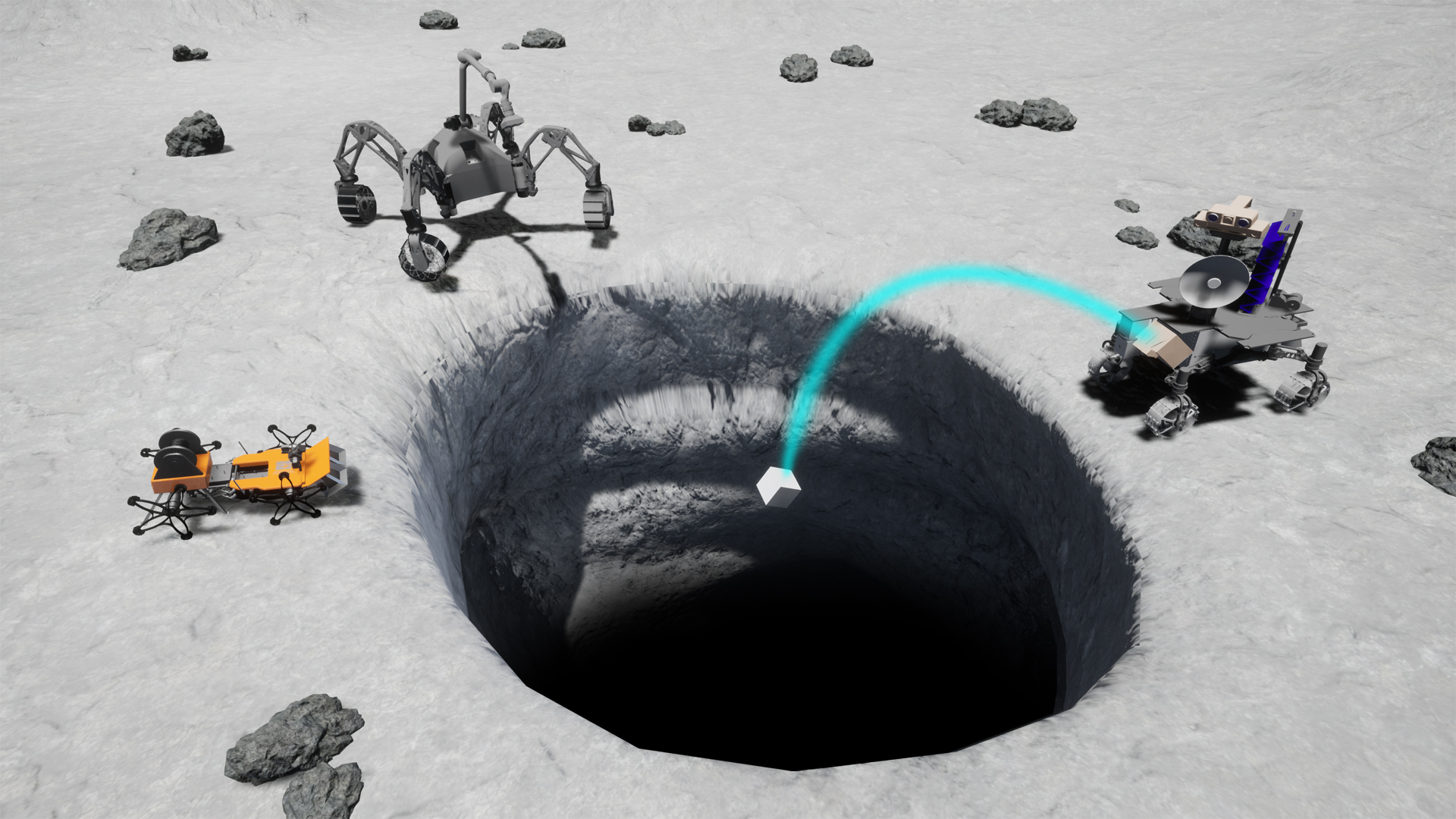
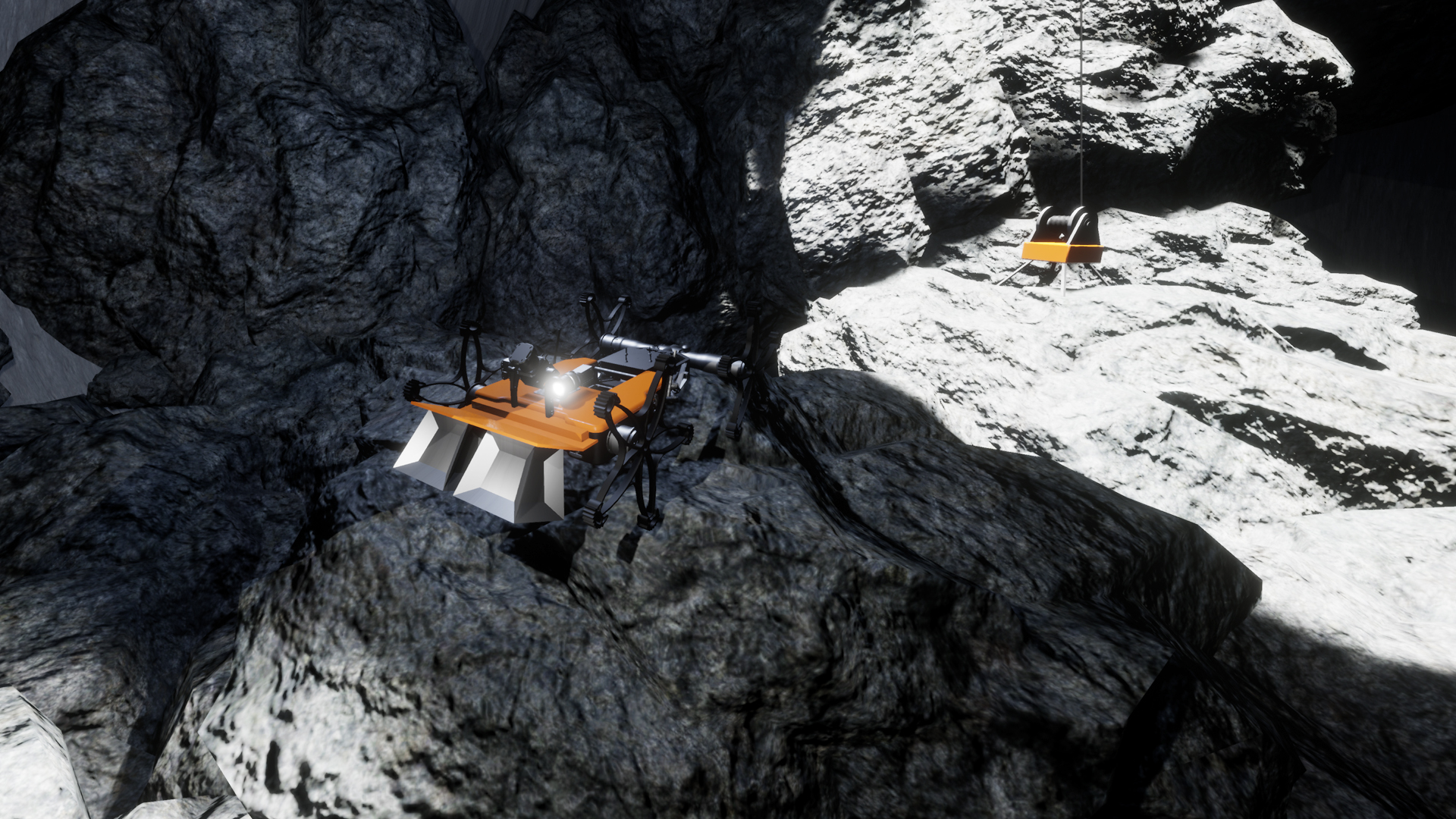
Lava caves on Mars and particularly on the moon are not only interesting for exo-geologists and other space scientists, but they also could be used as storage rooms or even habitats for future human settlements. The question is how to access and explore these huge cavities under the lunar surface without risking the lives of astronauts.
This is where robots, or rather teams of robots, come into play. In the future, several cooperating robots could explore the surface above a lava tube and even enter and explore the cave from the inside. In CoRob-X, we demonstrated in a Lunar Analogue Mission on Lanzarote how this could work. With the joint effort of researchers from five European member states and funding from the European Commissions’ H2020 Programme, we had developed a robotic exploration team of three autonomous robots. In January/February 2023, the CoRob-X robot team was able to successfully complete all four phases of a lunar lava tube exploration mission. But see for yourselves…