CASCADE
Cognitive AutonomouS CAtheters operating in Dynamic Environments

The CASCADE project processes the state of the art in catheter steering by developing a unified control framework for continuum robots that rigorously addresses the intrinsic interaction with complex and deformable environments. The proposed control framework will be applied and validated for the specific and challenging procedure of percutaneous aortic valve replacement. The project will contribute to the development of surgical continuum robot as well as the cardio-vascular diagnostics or treatments.The effectiveness, reliability and repeatability of the current state of the art in robotic catheterization will be improved.
| Duration: | 01.02.2013 till 31.01.2016 |
| Donee: | University of Bremen |
| Sponsor: | European Union |
| Partner: | KUL(BE)(Coordinator), ICSTM(UK), UCL(UK), MAT(BE), M7(CH), EndoSense(CH), ZHAW(CH) |
| Application Field: | Assistance- and Rehabilitation Systems |
| Related Projects: |
ACTIVE
Active Constraints Technologies for Ill-defined or Volatile Environments
(04.2011-
03.2015)
|

Project details
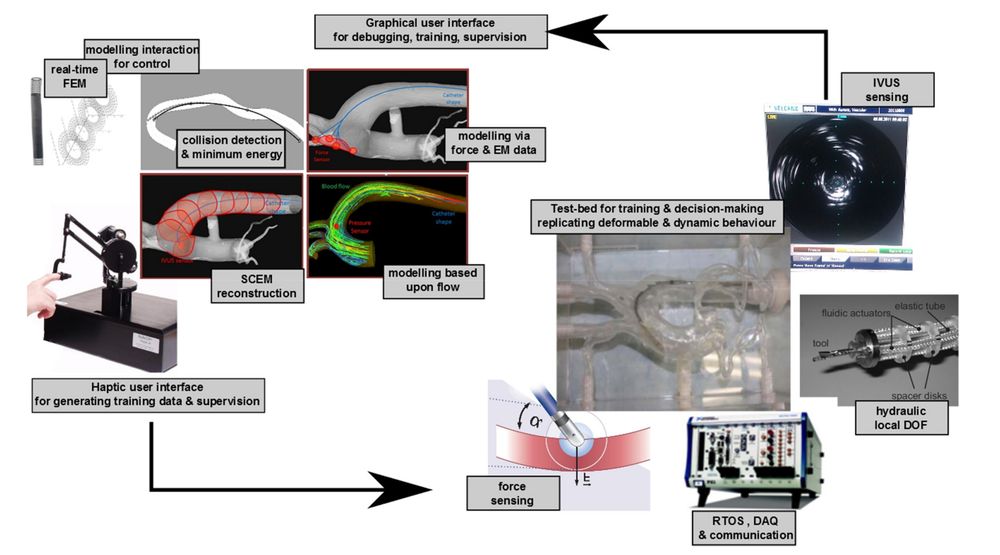
Continuum robots require radically different controllers and control schemes from those used in conventional rigid robots. Robotic catheters are a particularly challenging specialization of continuum robots because the vascular tree surrounding the catheter is complex, deformable and highly dynamic. This challenge is further complicated by the limited visibility during the procedure.
For improving the precise catheter control in the complex environment, a thorough understanding of the surgical context and the navigation and manipulation plans are required. The project will construct general mathematical descriptions of the continuum robot and its surroundings while model parameters will be identified during clinical operation.
In cases where fusing preoperative data with intra-operative sensors does not provide sufficient information to allow reliable decision-making, active sensing techniques will be adopted. An interface to the supervising surgeon will enable cognitive links between the operator and the continuum robot, facilitating complementary assistance during autonomous execution of surgical tasks. The interface will also be used for learning and robotic training and further for validation of techniques using identified clinical benchmarks.
The developed skill analysis tools will be used to verify the achievable control performance of continuum robots in catheter procedures. In particular, the project will advance the treatment of cardiovascular diseases by providing a new dexterous and intelligent instrument that is initially focused on aortic valve replacement.
The primary tasks of the University of Bremen can be summarized as follows:
Learning robotic catheter skills for autonomous execution:
For an autonomous surgical robotic execution, machine learning is an effective way to plan the procedure by learning from the surgeons. In the project, various machine learning techniques will be investigated to learn the different surgical skills involved in the targeted procedure. Due to the requirements such as safety, reliability and accuracy are very important in endovascular surgery, the safe interaction and efficient exploration techniques in deformable environments will be investigated.
Advanced control and decision-making for continuum robots:
The task starts from a rigorous treatment of the interaction between robot and environment that considers their coupled behavior over the full length of the robot.
Due to the deformable and dynamic environment, the force, hybrid position-force and impedance control will be investigated for the control framework.
For further information please visit the projects webpage: http://www.cascade-fp7.eu/