Video archive
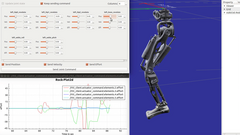
RH5 Manus: Introduction of a Powerful Humanoid Upper Body Design for Dynamic Movements
Recent studies suggest that a stiff structure along with an optimal mass distribution are key features to perform dynamic movements, and parallel designs provide these characteristics to a robot. This work presents the new upper-body design of the humanoid robot RH5 named RH5 Manus, with series-parallel hybrid design. The new design choices allow us to perform dynamic motions including tasks that involve a payload of 4 kg in each hand,
and fast boxing motions. The parallel kinematics combined with an overall serial chain of the robot provides us with high force production along with a larger range of motion and low peripheral inertia. The robot is equipped with force-torque sensors, stereo camera, laser scanners, high-resolution encoders etc that provide interaction with operators and environment. We generate several diverse dynamic motions using trajectory optimization, and successfully execute them on the robot with accurate trajectory and velocity tracking, while respecting joint rotation, velocity, and torque limits.