Video archive
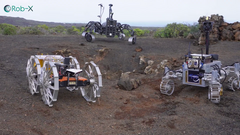
PRO-ACT: Multi-Robot Cooperation in Space
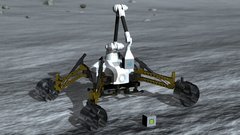
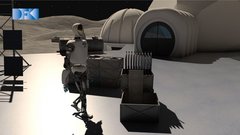
Multi-robotics cooperation is one of several key technologies that are seen as promising for planetary exploration. In the PRO-ACT project, these technologies were applied and further developed. The involved robotic systems VELES (a six-wheeled rover from PIAP Space, Poland), Mantis (a six-legged walking robotic system from DFKI, Germany) and the Mobile Gantry (a four-wheeled gantry with a 3d printer from AVS, Spain) were foreseen to perform tasks together. In the last months of the project, the Corona pandemic situation worsened, and as a result, travel restrictions also increased, so that the joint tests with the robotic systems could not be carried out together as planned. The video gives an insight into how the cooperative tasks could still be tested to successfully complete the project.
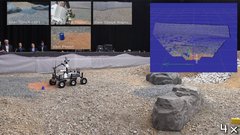
Other videos show the final tests conducted in more technical detail.