Video archive
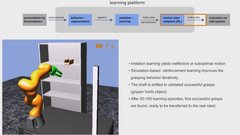
iLAADR: Initial experiments with the robotic manipulator
Currently, we are performing laboratory experiments with the robotic manipulator. This includes testing the separate software components (marker and object detection, motion planning and execution, grasping), as well as coordination of state flow and error handling. As a next step the robotic manipulator will be integrated in the AGV, before starting tests in the real production environment at CRF (November).