The 20 latest videos
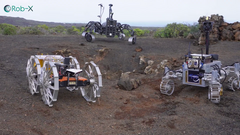
ANT: Navigation system enables walking systems to explore rough inclined terrain
The ANT project develops a navigation and motion control system for future walking systems for planetary exploration. After successful testing on ramps and rubble fields, the challenge of climbing rough inclines such as craters is being tackled. Iterative exploration of unknown targets and omnidirectional path planning generate efficient trajectories for the robots. Dynamic motion control generates motions for the torso and feet to follow the given trajectories while maintaining stability. In addition to blind haptic adaptation to the ground, a high-resolution local map is used for visual foot adaptation to avoid unstable edges and optimize traction.