Videoarchiv
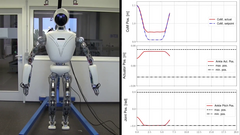
RH5 Manus: Vorstellung eines leistungsfähigen humanoiden Oberkörperdesigns für dynamische Bewegungen
Jüngste Studien deuten darauf hin, dass eine steife Struktur zusammen mit einer optimalen Massenverteilung die Schlüsseleigenschaften sind, um dynamische Bewegungen auszuführen, und dass parallele Designs einem Roboter diese Eigenschaften verleihen. In dieser Arbeit wird das neue Oberkörperdesign des humanoiden Roboters RH5, genannt RH5 Manus, mit seriell-parallelem Hybriddesign vorgestellt. Die neuen Konstruktionsentscheidungen ermöglichen es uns, dynamische Bewegungen auszuführen, einschließlich Aufgaben, die eine Nutzlast von 4 kg in jeder Hand erfordern,
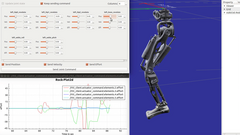
und schnelle Box-Bewegungen. Die parallele Kinematik in Kombination mit einer seriellen Gesamtkette des Roboters ermöglicht uns eine hohe Krafterzeugung bei einem größeren Bewegungsbereich und einer geringen peripheren Trägheit. Der Roboter ist mit Kraft-Drehmoment-Sensoren, Stereokamera, Laserscannern, hochauflösenden Encodern usw. ausgestattet, die eine Interaktion mit dem Bediener und der Umgebung ermöglichen. Wir generieren verschiedene dynamische Bewegungen mit Hilfe von Bahnoptimierung und führen sie erfolgreich auf dem Roboter mit genauer Bahn- und Geschwindigkeitsverfolgung aus, wobei wir die Grenzen für Rotation, Geschwindigkeit und Drehmoment der Gelenke einhalten.