Videoarchiv
Torque-limited simple pendulum: A toolkit for getting started with underactuated robotics
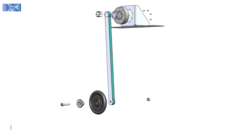
This project describes the hardware (Computer-aided design (CAD) models, Bill Of Materials (BOM), etc.) required to build a physical pendulum system and provides the software (Unified Robot Description Format (URDF) models, simulation and controller) to control it. It provides a setup for studying established and novel control methods on a simple torque-limited pendulum, and targets students and beginners of robotic control. In this video we will cover mechanical and electrical setup of the test bed, introduce offline trajectory optimization methods and showcase model-based as well as data-driven controllers. The entire hardware and software description is open-source available.