Videoarchiv
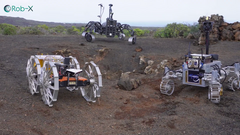
Coyote III Demonstriert ein robotisches Such- und Rettungsszenario
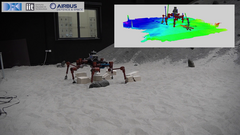
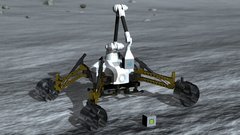
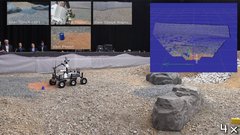
Coyote III – Ein Mikro Rover der ursprünglich für die Weltraumexploration entwickelt wurde, hat seine Vielseitigkeit bereits in diversen Szenarien gezeigt. Der Rover besticht hierbei durch hohe Mobilität und Flexibilität, um alle Situationen zu meistern.
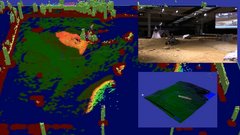
Neben dem Weltraum kann Coyote III auch für Such- und Rettungsaufgaben (SAR) auf der Erde eingesetzt werden. Über die Kamera und den Laserscanner erhält der Fahrer einen klaren Überblick über die Umgebung und kann den Rover sicher bedienen. Durch die modulare Systemarchitektur können verschiedene Sensor- und Nutzlastmodule an den Rover angeschlossen werden. Dies ermöglicht es die Rettungsteams in unterschiedlichen Situationen zu unterstützen und die Sicherheit ihrer Arbeit zu erhöhen. Hierbei kann Coyote III auch völlig autonom eingesetzt werden und ausgedehnte Gebiete erkunden.
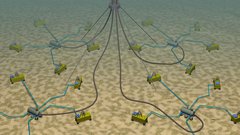
Zusätzlich zur Kartierung und visuellen Lageerfassung ist die Detektion und Kartierung von Gefahrstoffen ein wichtiger Bestandteil für den SAR Einsatzbereich. Zur Demonstration dieser Eigenschaften wurde ein beispielhaftes Umweltsensormodul konzipiert und in ein modulares Nutzlastmodul integriert. Das Sensormodul ist mit verschiedenen Gassensoren sowie Temperatur- und Luftfeuchtigkeitssensoren ausgerüstet.
Eine derartige Sensorausrüstung kann zum Beispiel dazu eingesetzt werden Gaslecks zu identifizieren oder für das Einsatzpersonal gefährliche Kohlenmonoxid- oder Faulgasbelastungen zu detektieren. Während seiner Fahrt erzeugt der Rover automatisch eine Umgebungskarte und trägt die detektierten Umweltparameter, wie zum Beispiel eine Gaskonzentration, hierin ein.